应对无线多媒体挑战(05-100)
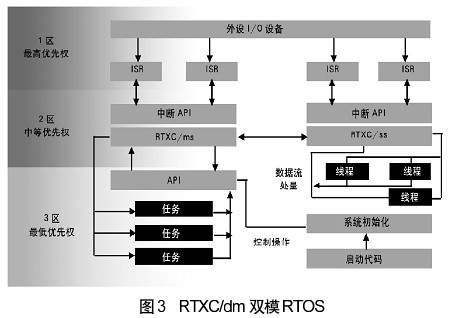
图3 RTXC/dm 双模RTOS
本文引用地址:http://www.eepw.com.cn/article/91483.htm开发的双重任务
通常MCU和DSP软件开发组是两个独立的设计组,每个设计组可自由地选择自己的RTOS和开发工具,并启用从自己选择供应商处提供的软件堆栈。然而,开发组现在面对融合处理技术,事实上是同一个处理器。
为了更好地阐明这一问题,我们更详尽地考虑每个处理器模型的RTOS要求。DSP具有数据流特性,一个过程连续地对一组数组执行某个算法,同时产生另一组数组,并将它传递给序列中另一级。DSP处理过程常常涉及有严格采样和处理要求的高频I/O,因而RTOS以最小等待时间来响应中断是至关重要的。
理想地,RTOS在DSP过程的执行周期间保存和恢复最少量内容,以及在过程调度表和内核服务程序两者中提供最低开销。实时或控制过程则能随时中止或等待同步事件的发生。为了支持这类要求,控制应用常使用多任务RTOS,,其中的调度表来确定那一个任务取得RTOS,其中的调度表来确定哪一个任务取得CPU的控制权。一旦过程发生变化,RTOS必须保存和恢复过程的内容,这一操作会涉及传送大量字节并耗费众多处理周期。这类操作让处理器有可能根据系统的动态来中止或启动某个过程,虽然这一特性控制过程是十分理想的,但对DSP并不需要。
对这类新型的融合处理体系结构,最重要的是开发人员并行地管理高数据率、面向数组的处理过程和事件驱动的控制过程,且具有使用与专用 的MCU或DSP同样高的效率。在这样模式中,理想的RTOS在某些时刻像低开销,轻便的DSP;而在其它时刻又像复杂的多任务RTOS。
为了让融合处理更有效,RTOS应工作在混合模式或双模模式。双模RTOS用公共API将实时控制过程用的传统任务基内核体系结构和DSP与数据流用专用单堆栈执行方式有机地组合在一起。这种统一的RTOS解决方案有可能让两类应用代码充分地优化在单个处理器上执行。在双模RTOS中,为开发人员充分地提供了内核功能以及单堆栈与多堆栈服务程序的全部功能,并用配置工具进行调整来符合应用的要求。图3是双模RTOS的实例。
用优先法管理线程和任务
既然两种处理模型能成功地共存在单内核体系结构中,双模RTOS使用3个独立的优先区(参见图2)。中断服务占据最高优先权(1区),即优先于其它区中的所有的操作。2区是中等优先权,是给单堆栈数据流操作保留的,包括所有的线程操作和多堆栈组件的内核操作。3区则用来处理其余所有的任务操作以及系统初始化与调用供内核服务程序用的API库,在1区和2区没有操作时才执行3区操作。
在这一模型中,执行线程的数据流应用总是有比控制面任务更高的优先权。也就是说,语音和频视处理一类数据流程操作,若按线程组织的话,可抢占任何任务,在返回至被抢占任务前完成操作。任务基操作在2区操作之间中取得处理器的控制权。在RTXC/dm内核中,线程与任务共存,因而任务可启动线程。由于2区的优先权高于3区,所以任务启动的线程拥有绝对抢先权。
结语
融合处理体系结构整合了微控制器功能和信号处理功能,标志着硅器件生产厂家目前的最高水平。与此同时,新体系结构迫切需要新一代实时操作系统,以便实现能充分发挥较高级处理能力的应用。双模RTOS将等待时间协同调度表和优先化的、能抢占的、事件驱动调度表有机地组合在统一的、集成的实时操作系统中。它也能提供多任务与单核心两种内核的全部芯心功能。这样,可以让各类开发人员在一个自己熟悉的、轻松的环境中得心应手地编写符合应用的要求的程序代码。■(东华)

霍尔传感器相关文章:霍尔传感器工作原理
电度表相关文章:电度表原理
霍尔传感器相关文章:霍尔传感器原理




评论