集体食堂全自动打饭系统设计

近年来,各类院校、企事业单位的公共食堂已基本实现了规范化和网络化,CAN总线、POS窗口机等的应用,极大提高了工作效率,增强了售饭管理系统的可靠性、实时性和灵活性。但这些系统采用的是传统的管理人员手工打饭方式,存在很多弊端,例如:
本文引用地址:https://www.eepw.com.cn/article/89789.htm(1)不能准确定量。人工打饭的饭量主要靠经验,不可能次次称重。员工所打饭量多于消费者要求量,食堂亏损;少于消费者要求量,消费者意见大,影响服务质量。
(2)浪费大量人力财力。打饭高峰期,一个员工要在一个小时左右的时间打几百甚至上千碗饭,工作量繁重,同时打饭员工的增多必然导致财力支出的增加。
(3)打饭效率低。有些员工经验不足,或是打饭速度不快,很容易造成消费者不满,排列队伍过长,食堂过分拥挤等现象。因此,在不改变现有食堂刷卡系统的条件下,研制开发出一套能实现真正“智能化”的全自动打饭系统具有十分重要的意义。
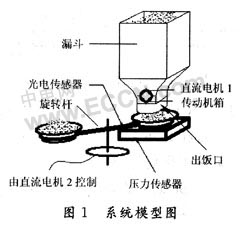
1 系统模型
此系统主要是由机械和电子控制2大部分组成。机械部分由直流减速电机、漏斗、支撑架、旋转杆等组成,控制部分由单片机、键盘、压力传感器、光电传感器、液晶显示等组成,如图1所示。当消费者通过键盘输入所需打饭饭量时,单片机控制液晶显示屏工作,显示具体饭量及消费金额,同时启动前端刷卡系统。在消费者刷卡并扣除当前所需消费金额后,单片机首先控制相关直流电机(电机2),使传递机构旋转180°,并通过光电传感器精确定位,将空碗送到打饭口下,然后控制另一电机(电机1)转动,出饭口向碗里输送米饭。当碗里的米饭的重量达到检测输入值时,电机1停转,电机2旋转180°把米饭送出去同时送入空碗,如此循环。
2 系统硬件设计
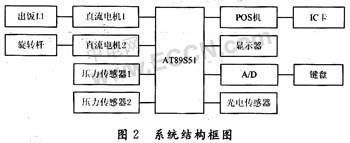
整个自动打饭系统的核心是单片机,采用8位微控制器AT89S51。此芯片在数据处理、逻辑分析等方面具有强大的优势,可以充分利用这一优势设计融合数据采集、模数转换、数据分析处理、直流电机控制、液晶显示等于一体的系统装置,完成出饭口排出米饭,传递饭碗以及实时显示等功能。结构框图如图2所示。
2.1 电机驱动模块
采用PWM方法,调节加在电机两端的平均电压,实现对直流电机的控制。但由单片机产生的PWM信号不足以直接驱动电机,需用驱动器将其转换成可驱动电机的驱动信号,如图3所示。驱动电路采用SOTS公司的专用电机驱动芯片L298N。他是恒压恒流双H桥电机驱动器,驱动能力强,可同时控制2台直流电机,输出电流可达到2 A。单片机通过控制L298N的使能端控制电机的启动和停止。当使能端为低电平时,电机停止;当使能端为高电平时,电机启动。通过控制使能端的脉冲宽度,而达到调整直流电机转速的目的。
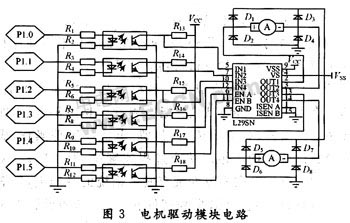
在实际应用中,为了保护电机,在驱动电路中加入了两组稳流二极管,且使供电电压VS大于其逻辑电压VSS,避免了电机失控现象。另外,为了抑制电机的大电流对单片机程序的冲击,系统中采用了光电耦合器实现隔离。该驱动电路结构简单,性能可靠。
2.2 旋转杆的控制设计
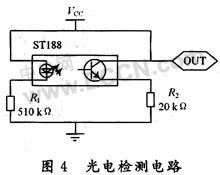
虽然单片机可以控制直流电机的减速,但直流电机在具体运行中仍存在一定惯性。为了能够使旋转杆送入的空碗正对着出饭口,此系统在旋转杆底部增加了发射取样式红外线对管ST188作为寻点传感器,图4为光电检测电路。ST188采用高发射功率红外光电二极管和高灵敏度光电晶体管组成,以非接触检测方式,检测距离可调整达2~10 mm。当旋转杆旋转时,保持发光管发光,当其下方为出饭口准确位置点标志时,其接受管输出为高电平。这样,控制系统就可以分析出当前空碗的位置,从而达到调整旋转杆运行状态的目的。
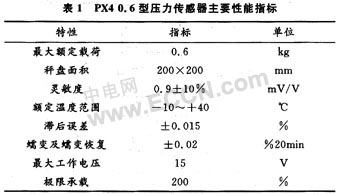
2.3 饭量称重设计
出饭口排出的米饭重量由称重控制系统完成,其称重范围为0~500 g。本系统中选用PX4 0.6型单点式称重传感器完成电子称重功能。此传感器为电阻应变式压力传感器,结构简单小巧,安装简单,且经过角差预调整,可以满足系统要求。其主要性能指标见表1。
传感器检测平台上饭碗及其内部米饭的重量,据此控制米饭加注过程的进行,表达式为:
![]()
其中,W表示已加注米饭重量,W0表示空碗重量,W1表示当前碗内米饭重量,W2表示加注前碗内米饭重量。
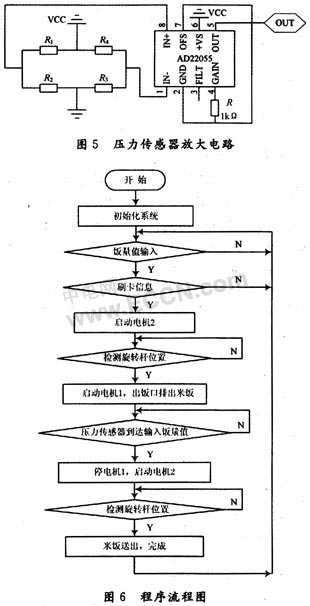
传感器输出电压为毫伏数量级,需要进行信号放大,如图5所示。图中利用电桥作为重量压力的测量电路,R1,R2,R3,R4作为电桥的4个桥臂,为阻值变化与外界受力相关的应变电阻,测量电桥由VCC供电。在空载时,电桥输出电压为:
![]()
当VCC=0 V时,电桥处于平衡状态,则电桥对运算放大器的输出为0。当称重压力变化时,RS将随压力变化而变化。这时电桥失去平衡,对放大器有不平衡电压输出。电桥的输出电压由AD22055检测放大后输出,放大倍数设定为50。
3 系统软件设计
系统的软件设计采用模块化设计方法,先设计出子程序并进行调试,然后进行模块集成,形成主程序。从实现功能方面考虑,子程序包括旋转杆位置监控、电机控制、键盘管理、称重检测以及显示管理等。具体程序流程图如图6所示。在设计程序时,除了尽量多采用单字节指令,避免“乱飞”程序以外,还建立了“看门狗”,利用系统的安全保护特性来处理“死循环”程序。
4 测试结果
4.1 运行时间
驱动电压为12 V时,直流电机1每分钟转100次,直流电机2每分钟转60次,由于系统采用的是PWM方法,加在电机两端的平均电压略低于12 V。经PC396电子秒表测试,旋转杆旋转180°所需的时间为0.8 s。
据统计,85%的消费者所打饭量为100 g或150 g,故只需对这2种消费情况进行测试。测试结果显示,此系统出饭口排出米饭量100 g平均所需时间为2.85 s,排出米饭量150 g平均所需时间为3.63 s。这样,从消费者输入饭量值开始,直至系统将盛好米饭的碗送出,整个过程平均所需时间分别为6.50~7.80 s。可见,系统运行速度快,大大提高了售饭效率。
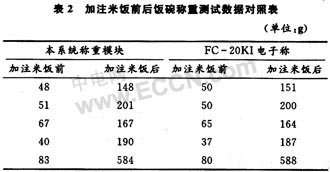
4.2 称重精度
将饭碗在加注米饭前后的重量用本系统称重装置和FC-20KI精密数字电子称进行比对测试,其测试结果表2所示。
从表2中可以看出,米饭重量测量精度小于±5 g,靠性高。
5 结语
针对目前集体食堂中传统手工打饭方式存在的种弊端,本文首次设计出一套全自动打饭系统,并已经制模型。系统具有2大特点:
(1)设计独特:除了利用键盘和显示器实现直观、透明的人机对话形式以外,系统还在机械结构上进行了精心设计,如巧用电机和旋转杆,并针对米饭的柔软性和粘性,设计了直流电机控制翻转型的齿轮完成米饭的排停,避免了米饭出口的堵塞。另外,系统控制部分与米饭加注和输送装置是分开布局的,所以清洁、卫生。
(2)操作智能:消费者只需在键盘上输入打饭饭量,拿卡在POS机上轻轻划过,把空碗搁在相应平台上,即可在短暂的时间内,完成读值、扣费、电机控制等操作,成功取得自己所需的米饭。整个过程速度快、控制准确、无需借助他人帮忙。在不改变现有刷卡系统的基础上,完全实现了管理规范化、有效化和智能化,为食堂的后勤管理节约了人力和财力开支。
经过反复试验,系统模型完全能够满足集体食堂的需要。其设计成本低、性能稳定、可靠性高、操作简单便捷,适用于高等院校、大型企事业等单位的集体食堂,为打造一流的膳食管理提供了有力保障,具有极其广阔的市场前景。

pos机相关文章:pos机原理
称重传感器相关文章:称重传感器原理
评论