基于GPS-OPS联合定位的公交车载终端

引言
本文引用地址:https://www.eepw.com.cn/article/82191.htm随着我国绎济的发展,城市的交通堵塞日趋严重,调查发现,交通矛盾突出的一个重要原因是交通管理水平较低,管理手段落后,对城市交通缺乏有效的动态监控管理手段。因此,人们需要一个能够满足各种管理要求并稳定运行的公交智能管理系统。本文首先对整个智能公交系统作概要介绍,然后从定位技术、硬件和软件三个方面对车载终端子系统的功能与实现进行综合讨论。
公交智能管理系统概述
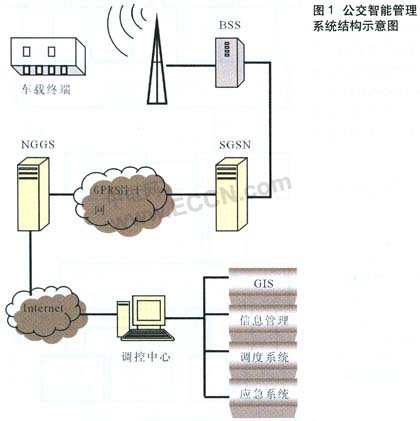
公交智能管理系统主要包括车速传感器、车载数据分析处理器、移动通信终端、分组数据网络以及公交系统计算中心和GIS电子地图等,系统结构如图1所示。安装在车上的传感器采集到信息,将信息传送到车载数据分析处理器,冉通过分组无线业务GPRS经互联网传送到调控中心,以实现交通信息的汇集、应急处理、调度等。
车载终端子系统
车载终端是公交智能管理系统的核心部件,其主要的功能包括多个方面:其一是使用GPS-OPS联合定位的方式,获取运营车辆当前的实时位置;二是采集车辆的动态运行状念,包括车速、里程、经纬度、到站站点等,实现超速告警、赖站告警、语音自动报站等,完成对运营车辆的动态监控管理;三是在长途客运和物流车辆管理中,车载终端会自动提示驾驶员休息;四是智能车载,终端配备有应急事件处理装置,可构成“道路交通安全预警及救援系统”。在车辆出现超速、疲劳驾驶时,车载终端会自动向驾驶人员发出安全预警提示信息。如遇应急事件,驾乘人员或乘客按下智能终端对应的告警按键,车载终端自动发送122、119、120等求救信息到中心,中心将显示求救车辆的线路号、车号、发生事故路段、时间等内容,并能及时进行抓拍。
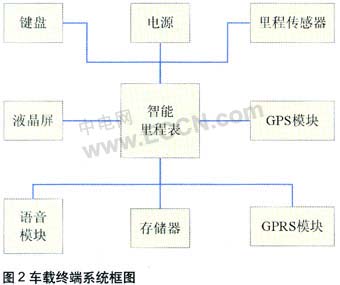
车载终端系统框图如图2所示。
OPS技术
罩程表定位技术OPS(OdometerPosition System)是一种针对公交车辆定线行驶特点的车辆定位与导航技术,能有效地克服GPS在建筑物密集地区使用时常出现卫星信号被遮挡的问题,同时也克服了DR(航位推算)过于复杂的弱点。OPS的关键技术之一是如何将里程数与电子地图上的经纬度相联系起来,另一关键技术是测量车辆里程。OPS定位方案贴近公交系统的实际特点,能很好的满足公交智能管理的要求,并且在成本和运行稳定性上具有优势。但这种定位方式也有不足之处,因为运营车辆的进出站点等额外动作会增加实际的行驶里程,造成定位精度漂移。车载终端子系统中采用GPS-OPS联合定位方式能很好地弥补这两种定位方式各自的不足之处,实现实时精确定位。
车载终端硬件设计
车载终端硬件由数据分析处理器和输入/输出终端两部分组成,它们通过串口进行数据交互通信。
数据分析处理器包含智能里程表、报站器、GPS与GPRS模块等。这里,智能里程表将车速传感器采集的脉冲信号进行变换,转换成车辆行驶里程和速度,形成对车辆进行动态监控的各类数据。报站器则是按公交系统报站规范实现自动报站。GPRS模块实现数据双向传输及通话。GPS模块获取车辆实时位置信息并结合智能里程表完成GPS-OPS联合定位。
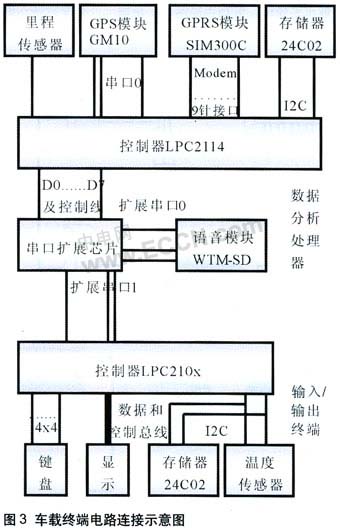
考虑到产品成本,这里选用LPC2100系列32位ARM处理器作控制器,以8位单片机的价格获取32位处理器的强大性能,并留有足够的资源以实现扩展需求。图3是车载终端数据分析处理与输入/输出终端两部分的电路连接示意图。
车载终端软件设计
车载终端的软件采用模块化结构设计,由主函数、底层驱动函数、功能模块函数以及中断服务函数组成。全部程序在ADS1.2集成开发环境里编译,并通过JTAG口下载到目标板里凋试通过。以下仅对关键代码和算法进行介绍。
车速传感器脉冲计数
处理器计数器每接收8个脉冲(车轮转一圈)产生一次中断,里程数全局变量加一,并按车辆特征系数(测试车辆车轮一圈为1.5873米)转换为实际里程值。
速度的计算
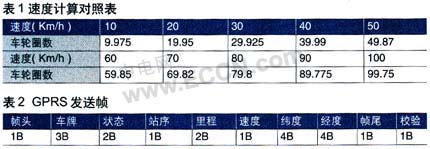
这里的速度计算并非使用路程除以时间的平均速度公式导出。在车载终端工作时,为保证实时运算速度、简便取值起见,使用经多次测量取得的经验数据作为计算参照。在实测中每5.7秒的车轮圈数与公交车的即时速度存在明显对应关系,且误差在合理区间内,即可换算为速度,参考速度计算对照表如表1所不。
GPRS数据帧
车辆行驶时产生的各种实时数据填充到数据帧中的指定位置,并与校验和以及帧头、帧尾一起形成20字节的待发数据帧。状态字段是包含告警信息在内的所有车辆当前状态,如表2所示。
GPS-OPS联合定位
由于GPS存在定位盲点以及OPS的里程漂移,它们都会造成定位精度或实时性的要求不达标。OPS与GPS结合,能发挥互补优势,融合车载终端自身的功能而形成的GPS-OPS联合定位方式,保证车辆定位的连续性和高精度性。因此,本文的终端设计使用了GPS-OPS联合定位方式。在实际的安装测试中,这种定位方式能很好的应用于公交定线车辆的实时动态监控中。流程图如图4所示。

结语
本文设计的车载终端子系统从公交车定线行驶的特点出发,具有低成本和高实用性的优点。该终端与公交智能管理系统中其它子系统进行的联合测试达到要求。今后亦可进行更多功能的扩展,如增加驾驶员身份识别功能等。












评论