一种基于PSoC的电动自行车控制器的设计(上)

硬件结构
本文引用地址:https://www.eepw.com.cn/article/81323.htmCypress的可编程片上系统(PSoC)由于其独特的SoC架构而给客户提供十分灵活的设计方便性。PSoC的特点是将8位微处理器核和通用的数字逻辑模块以及模拟模块资源集成在同一器件上,同时为了连接这些不同模块,内部有丰富的连线资源。这些内部连线资源可以用于内部模块的互联,也同样被应用到内部模块到外部I/O的连接。输出总线上的逻辑查找表(LUT)可实现和外部的控制信号之间的无缝连接。通用模拟模块和数字模块可以根据客户的实际需要独立或者组合配置成相应的应用模块,例如定时器,Delta-Sigma ADC,滤波器等。
为了降低控制器的成本,很多设计中采用一些低端的微处理器,这些微处理器一般只有一路的PWM输出,为了控制BLDC电机运行,需要微处理器外围上扩展一些数字逻辑器件以扩充PWM输出通道。同时为了检测电压、电流等其他模拟信号,还需要增加一些外围的信号调理电路。 这些都增加控制器上的元器件数目,并使PCB布线更加复杂。如果需要实现一些高级的电机控制,例如,ABS辅助刹车时PWM载波方式的灵活控制、同步续流等,还需要增加额外的数字电路。这样的设计总体成本实际上比采用高性能的微处理器的设计更高,并且增加了系统故障可能性。
因为在电动自行车设计中具有许多鲜明的特点,CY8C24423目前已被市场广泛接受。为了更好的满足客户的需求,Cypress在CY8C24423的基础上推出了CY8C24x33系列产品以更好的服务于电动自行车设计。同时,Cypress也推出基于CY8C24x33的电动自行车评估方案以缩短客户的开发时间。
图1是基于CY8C24x33的电动自行车应用框图。图中红色框内代表Cypess新型混合信号控制器(PSoC),以外的区域是控制板上其他电路模块。从图中可以看出,PSoC内部集成了实现电动自行车控制器所需要的数字及模拟资源如:脉宽调制器(PWM)、增益可编程运放(PGA)、比较器(CMP)、模数转换器(A/D)以及框图内没有具体标示的数字逻辑电路和布线资源。其中A/D部分,相较于之前的CY8C24423,CY8C24x33内部除了可以用数字和模拟模块组合出delta-sigma ADC外,用户还可以选用其内部集成的8位SAR ADC,其最高速度可以达到300Ksps,完全可满足电动自行车中对电流高速采样的要求。另外,CY8C24x33内部集成的FLASH 空间也扩展到了8K字节,以满足电动自行车设计越来越复杂的设计。
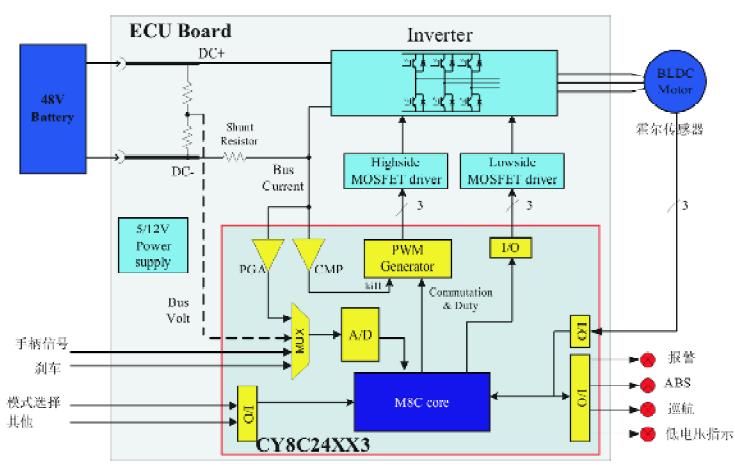
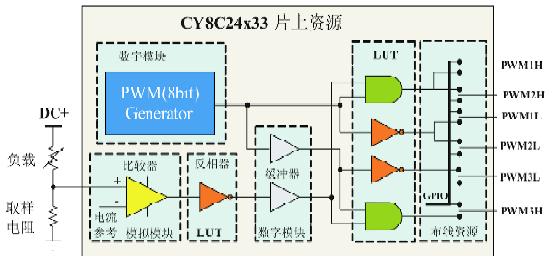
图2中还显示了该方案的过流检测和保护的实现。在电机设计中,过流保护非常重要。过大的电流将在很短的时间内损坏开关管,只有采用硬件保护方式才能有快速的反应时间,并及时关闭开关器件。该保护电路包括过流检测和PWM输出封锁电路,全部由PSoC的片上资源配置而实现的。从图中可看出,电流取样电阻上的电压输入到比较器的同相端,而比较器的反相端接到电流的参考值。比较器的输出经过反相器和缓冲器输入到输出总线的LUT上的与门,以控制上桥臂的PWM输出。正常工作时候(小电流时),电流取样电阻上的电压比比较器反相端的参考电压低,因此比较器输出为低电平,经过反相器后为高电平,使得LUT中的与门开启,PWM可输出到引脚上。而当过流时,LUT的与门一端输入为低电平,从而关闭了PWM的输出。同时,比较器将产生硬件中断以通知程序进行相应处理。PSoC的比较器反相端电压参考值可根据具体需要进行设置,从而可以在程序中非常方便的调整峰值保护电流的阀值。
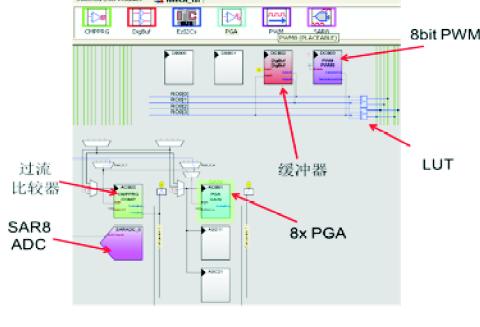
图3是该设计在PSoC Designer开发环境下的内部资源配置图。除了前面所描述的PWM输出,过流检测和保护电路外,还包括一个PGA用于放大输入的电流采样信号以及SAR8 ADC。
以上所述可以看出,基于PSoC的电动自行车控制器的硬件设计非常简洁。其内部所有的数字和模拟资源都可以动态配置,I/O内部连线也可以随时改动,既提高了系统的集成度,也增加了系统保密性,并且具有高度的灵活性。原先很多PCB布局布线工作,现在可以放在软件集成环境中,有芯片内部连线完成,可以大大缩短设计周期。
软件设计
目前电动车市场的系统方案日趋成熟,各个方案相似程度较高。如果就功能来说,大多是一些基本功能的组合。这些基本功能主要包括:无级调速;低压检测;系统显示/人机界面;电机堵转保护/过流保护;电机缺相位检测;自动巡航;电子刹车/滑行充电;防盗报警;1:1助力。
以上这些基本功能,可以被分成两大类,一类是行驶功能,第二类是保护功能。行驶功能中的重点就是BLDC电机的控制。保护功能中的重点包括对人的保护如刹车,以及针对车的保护如过流保护,堵转保护等。因为刹车技术内部涵盖了诸如电流的调理,信号的检测以及功率系统的PWM驱动等内容,这里着重对电动自行车的刹车进行深入的介绍。
BLDC电机控制
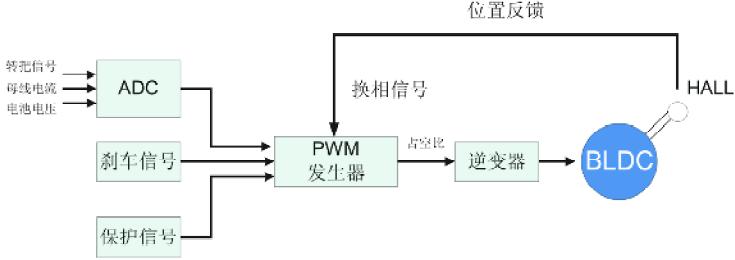
带传感器的BLDC的电机控制原理较简单,配合霍尔传感器的信号,产生合适的控制输出序列,可以驱动电机旋转。在电机旋转的基础上,如果我们在六拍控制信号中引入PWM,即可以实现调速功能。电动自行车的BLDC电机控制与通常的带传感器的BLDC电机控制没有太大的区别,只是在电动自行车常工作在颠簸振动的状态,接插件容易松动造成HALL信号输入的失效,程序设计时需要充分考虑异常情况的处理。图4是电动自行车基本的控制框图。可以看出,电动自行车的BLDC是一个速度开环控制系统:PWM控制器的占空比是由多个输入因素决定的,这些因素主要包括转把输入电压,直流总线电流大小,电池电压,刹车信号以及一些保护信号。电机的转速和负载是直接相关的,当负载加大时,用户必须通过加大转把输入电压来提高PWM输出的占空比,从而增加电机输出转矩以维持相应的速度。
电子辅助刹车
目前市场上常见的电动车,刹车是以机械为主,辅以电子制动。电子辅助刹车可有效缩短刹车的距离,并且在机械刹车失效的时候仍然可保证有效的刹车,从而提高车辆的安全性。另外,电子辅助刹车可延长机械刹车器的使用寿命。

根据BLDC电机的工作原理可以知道,通过改变线圈电流方向就可实现BLDC电机转矩方向发生改变。因此,如果在电机线圈上施加与正常旋转时候的电流方向相反的电流就可产生电子刹车所需要的转矩。目前电子刹车方法主要有五种,在实际软件设计中,需要根据实际情况结合使用。表1是五种常见的电子辅助刹车控制方法及其特点。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理




评论