基于SLH89F5162的智能清洁机器人

一、项目设计背景及概述
本文引用地址:https://www.eepw.com.cn/article/273932.htm清洁机器人是服务机器人的一种,所谓服务机器人是指自主或半自主的、从事非生产活动、能完成有益于人类健康的服务工作的机器人。家庭清洁机器人集机械、电子、传感器、计算机、控制、机器入技术、人工智能等诸多学科为一体,能够自动进行房间地面的家庭卫生服务。在一些发达国家的很多公共场合已经开始使用清洁机器人,随着清洁机器人性价比的提高,清洁机器人进入家庭成为可能。
家用吸尘器作为当今家庭的主要的日常清洁工具,会与用户形成频繁的互动关系,产品和消费者产生一种直接的接触与沟通。近些年,智能手机发展迅速并得到了广泛的普及,成为许多人的生活与工作的必需品,如果能够用手中的智能手机就完成对吸尘器的的有效控制,将会为人类的清洁工作带来极大的便利。智能手机与清洁机器人结合,兼具智能手机良好的操作体验和清洁机器人便利又高效的清洁作用。
此次深联华单片机大赛提供的“三防”单片机给我们提供了一个很好的平台来实现我们的想法,融合智能手机以及机器人领域的关键技术,本课题旨在开发一种成本低能够充分满足家庭需求且方便适用的智能家庭清扫机器人。使它可以替代传统的家庭人工清扫方式使家庭生活电气化、智能化使科技更好地为人类服务。
二、项目设计原理
2.1、原理概述
清洁机器人需要完成的任务是能够在房间中自动清洁地面。工作时,利用各种传感器测得环境信息,并做出决策,实现边行走边打扫,完成预定的任务。典型的清洁机器人主要由以下几个模块组成:
(1)信息采集模块
(2)决策模块
(3)运动控制模块
(4)清扫模块
这四个部分构成了完整的清洁机器人系统,如图2-1所示。信息采集模块返回当前清洁机器人的位置信息,如是否碰到障碍物、是否遇到楼梯等,然后把这些信息送给决策模块进行决策,控制运动控制模块,使机器人转弯或者后退等,在机器人运动的同时让清扫模块进行清扫,完成打扫地面的任务。
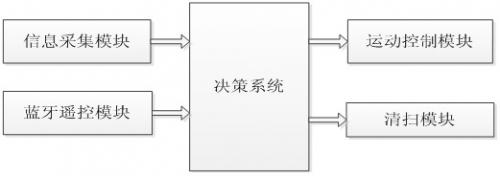
图2-1清洁机器人系统典型组成示意图
2.2、硬件设计原理
2.2.1机械结构设计
机器人本体的良好设计是实现其他各功能模块的基础。本文设计的清洁机器人采用三轮机构的车体,两个动力轮,一个万向轮,具有运动灵活,控制简单的优点。
机器人在地面上移动的方式通常有三种:轮式、履带式和步行式。步行移动方式模仿人类或动物的行走机理,用腿脚走路,对环境适应性好,智能程度也相对较高,但步行移动方式在机构和控制上比较复杂:履带移动方式将环状循环轨道履带卷绕在若干滚轮外,使车轮不直接与地面接触,履带式的的优点是着地面积比车轮式大,所以着地压强小,适于爬坡或者不平的地面;轮式移动方式是最常见的一种地面行进方式,其特点是:能高速稳定的移动,能量利用效率高,机构和控制简单,但不能爬坡。本设计中清洁机器人只需在室内打扫,工作环境较好,所以采用轮式移动方式。
超声波传感器需要安装在底盘上,且需要安装在合适的位置并牢固可靠。本设计中将超声波模块直插在固定的电路板上,进而固定在底盘上。机器人行进时,主要是对要前行的路探测是否有障碍物,因此将超声波模块安装在车身的最前端。
本系统选用双轴HC02-48强磁电机,电机运行稳定,无抖动。扭力强劲130强磁直流减速电机,扭力为普通电机的2至5倍,电压3-9V,变速箱1:48比速,小车最佳比速,速度与力量完美组合。
清扫机器人的吸尘技术有两类:真空吸尘器和气流滤尘器。真空吸尘器是由高速旋转的风扇在机体内形成真空从而产生强大的气流,将尘埃和脏物通过吸口吸入机体内的滤尘袋内。气流滤尘器是一个全封闭系统,既无外部气体吸入,也无机内气体排除,其原理是利用附壁效应去形成低压涡流气体,最后将沉渣截留于吸尘器内的涡流腔内。
2.2.2硬件电路设计
根据清洁机器人功能要求,清洁机器人硬件系统包括单片机最小系统、电源模块、电机驱动模块、超声波模块、蓝牙模块。
本系统采用SLH89F5162作为核心控制芯片。采用了多种防破解技术。SLH89F5162单片机是一款功能比较强大的单片机,它拥有两个全双工串行通信接口,串口1的功能及操作与传统51单片机串行口相同:特殊的是SLH89F5162单片机内部有一个独立波特率发生器,串口1可以使用定时器1作为波特率发生器,也可以使用独立波特率发生器作为波特率发生器;而串口2只能使用独立波特率发生器作为波特率发生器。SLH89F5162是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8-12倍。内部集成3路PWM,8路高速10位A/D转换,针对电机控制,强干扰场合。SLH89F5162单片机为整个控制系统核心,考虑各模块的功能需求以及单片机各个I/O口的特性后。
硬件系统由以下几个模块构成:电源部分,负责提供稳定的5V电源;晶振电路,为系统提供时钟;复位电路,按键后对系统进行复位:蓝牙模块,接收手机发送的控制信号;超声波模块,进行实时测距以躲避障碍物;驱动模块,驱动电机工作,实现机器人的行走。
时钟电路在单片机系统硬件设计中往往是一个关键的部分,由于晶振的工作频率很高,设计不当就很有可能使其工作时的产生的高频信号对其他电路造成干扰;若晶振工作不正常,则会导致整个单片机系统无法运行。SLH89F5162系列单片机的时钟输入接在其14(XTAL2)和15(XTAL1),通常是接一个12M的晶振体。晶振和单片机引脚之间的连线尽量要短,这样可以保证其工作的稳定性和避免晶振的高频信号过多的干扰周围线路。晶振的下方和周围尽量不要走线,尤其是对信号质量要求高的器件的线路。
单片机需要在上电之后给其一个复位信号才能正常工作,在开发和调试单片机系统时也往往要对它进行手动复位,而且当单片机系统供电电压过低时,程序的运行会出现非正常的情况,要求在低压时也必须对单片机系统进行复位。SLH89F5162单片机的RESET引脚为低有效,平时为上拉高电平,复位时,需要给其一定时间的低电平。
机器人系统要稳定工作必须有强健的电源供给作为保障,强大的电源可以使系统在各种环境下长时间稳定的工作,因此电源管理是整个系统可靠运行的基础。本系统中电源分为功率和信号两部分输出,即单片机最小系统、超声波传感器接口、蓝牙接口的电源由信号电源供应;电机驱动、微型吸尘器的电源由功率电源供应。
电流变送器相关文章:电流变送器原理 光电开关相关文章:光电开关原理 脉宽调制相关文章:脉宽调制原理 激光器相关文章:激光器原理









评论