DIY一个家庭灭火机器人,附软硬件的系统解决方案

1.项目的内容和具体目标等
本文引用地址:https://www.eepw.com.cn/article/273931.htm首先我介绍一下机器人产生的背景,机器人技术的发展,它应该说是一个科学技术发展共同的一个综合性的结果,也同时,为社会经济发展产生了一个重大影响的一门科学技术,它的发展归功于在第二次世界大战中,各国加强了经济的投入,就加强了本国的经济的发展。
另一方面它也是生产力发展的需求的必然结果,也是人类自身发展的必然结果,那么人类的发展随着人们这种社会发展的情况,人们越来越不断探讨自然过程中,在改造自然过程中,认识自然过程中,实现人们对不可达世界的认识和改造,这也是人们在科技发展过程中的一个客观需要。
那么什么是机器人呢?人们一般的理解来看,机器人是具有一些类似人的功能的机械电子装置,或者叫自动化装置,它仍然是个机器,它有三个特点,一个是有类人的功能,比如说作业功能,感知功能,行走功能,还能完成各种动作,它还有一个特点是根据人的编程能自动的工作,这里一个显著的特点,就是它可以编程,改变它的工作、动作、工作的对象,和工作的一些要求,它是人造的机器或机械电子装置。
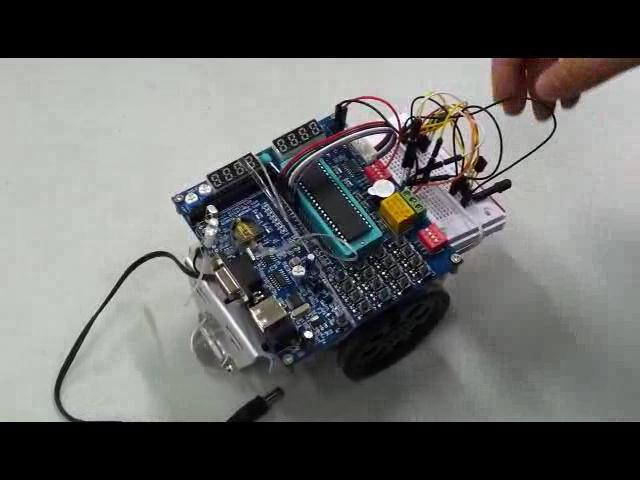
随着社会与国家的发展,在经济迅速增长的同时,各种危险场所不可避免的火灾频繁出现,给社会安全造成了很多隐患,于是现代火灾及时补救已成为迫在眉睫需要解决的问题,救火早一刻就少一分损失,消防救援人员固然速度已经很快,但也需要一段不小的时间,而且进入救火现场还有生命危险的可能,于是灭火机器人的理念诞生了,笨设计主要就是针对灭火机器人的制作与研究,小车以AT89S52单片机为控制核心,加以电源电路、电机驱动、光电传感电路、火焰检测电路、灭火风扇以及其它电路构成。电源电路提供系统所需的工作电源,专用电机驱动芯片驱动电机控制小车的前进后退以及转向,光电对管完成寻迹和避障,光敏电阻传感器检测火焰,灭火风扇进行灭火。本设计制作的消防小车具有简易灭火功能,达到了实现现场灭火的目的。
通过灭火机器人的设计,我们可以了解机器人灭火任务, 知道简单的程序算法,掌握通过机器人识别白线、机器人检测火焰等方法灭火的方法。 通过制作灭火机器人我们可以弄懂简易灭火机器人的搭建、火焰传感器的使用,知道机器人寻找火源完成简单灭火任务。此外我们可以培养观察能力、动手能力、创造能力,养成良好的思维习惯。通过对光学、计算机科学、机械原理以及美学等的综合运用,提高知识的综合运用。通过竞赛机制,锻炼我们的竞争和合作意识,锻炼学生比赛时的灵活性。最终目标,我们设计出一种快速灭火的机器人,能够有效地消灭火灾,为人们减少火灾损失;为人们生活带来方便。
2.研究方法、研究方案及可行性
一、硬件
通过对比赛规则的研究,设计机器人的系统结构如图2所示
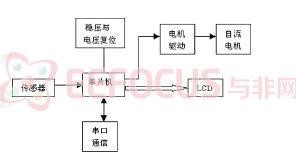
1.1传感器部分
传感器检测环境信息,描述机器人与环境的相互关系。针对比赛规则,机器人主要使用了红外传感器、灰度传感器及相应的信号处理电路。机器人灭火装置是一个风扇,当机器人接近火源时自动打开风扇,吹灭火焰。用LCD作为输出显示。红外传感器有两种,一种用来检测障碍,避免撞到墙壁同时又可以寻找房间的门。红外传感器能够检测到前方10cm~80cm,90°范围内的比0.03平方米面积大的障碍物。
红外传感器由两个红外发射管和一个红外接收管组成。红外发射管发出红外线,红外线在遇到障碍物后被反射回来,红外接收管收到被反射回来的红外线后,通过A/D转换送单片机进行处理。另外,一种红外传感器用来探测火源。这种火焰红外传感器可以探测到波长在700nm~1000nm范围内的红外光,适宜用来探测火源或热源,探测角度为60°。
红外传感器将外界红外光光强的变化转化为电流的变化,通过A/D转换器转换为0~255范围内的数值。外界红外光越强,数值越小。因此,越靠近热源,机器人显示读数越小。根据函数返回值的变化能判断红外光线的强弱,从而能大致判别出火源的远近。灰度传感器用来检测场地内的路标,以便准确找到房间和有效灭火范围。比赛场地地面除了表示起点的圆圈、房间的门和有效灭火范围是白色的外,其余都是黑色的。灰度传感器由光敏电阻和发光二极管组成,发光二极管照射到地面的反射光线被光敏电阻接收,其电阻值根据反射光线强弱而改变。地面灰度大,光敏电阻值大;地面灰度小,光敏电阻值小。阻值的变化转变成电信号输入到机器人主板上的微控制器,再由微控制器中的A/D转换器将电信号进行转换。
电流变送器相关文章:电流变送器原理









评论