基于NEC单片机田间超声波测距的应用

为了方便农机手能够迅速、准确地知道机具作业的深度,提出一种基于NEC单片机的田间超声波测距方法,设计非刚性接触地面仿形装置和电子控制系统,利用超声波测距传感器和NEC单片机,通过NEC专用软件开发工具Applilet自动生成代码,在PM+集成环境平中建立目标源文件,最后将程序经烧写器烧入到单片机中实现控制任务,驾驶员通过观察LCD显示的实时运行参数,LED状态指示灯,或根据蜂鸣器报警等情况及时监测和调整机具作业深度,本研究为研制智能化装备提供了开发平台。
本文引用地址:https://www.eepw.com.cn/article/271414.htm在田间旋耕、收获、播种时,经常需要控制机具的作业深度,现有农业机械设备多无机具作业深度监测设备,既费力又影响田间耕作效果。我国在农业机械装备处于起步阶段,以东方红X-804拖拉机为研究对象,开发了电控液压转向系统和作业机具升降控制系统,实现了拖拉机自动转向操纵控制和作业机具自动升降控制,但整套设备价格昂贵,推广尚需时日。本文提出了基于NEC单片机的田间超声波测距方法,设计了一种地面仿形装置,利用超声波测距传感器和NEC单片机,将机具作业深度通过液晶屏显示出来。该方法在降低驾驶员劳动强度的同时提高劳动效率,具有实际应用价值。
1超声波传感器发射地面试验
由超声波传播理论可知,声波在传播过程中如果遇到直径小于超声波半个波长的障碍时,其声波会绕过障碍物而继续传播,即产生绕射现象,选取花盆上方同一水平面3行3列的9点测量。如图1所示,用超声波测量距书桌高度,图2为利用超声波传感器模拟测量地面的一组数据,在其传播路径中放有花盘时,超声波未发生绕射,原因是由于收获植物茎叶直径较大时,发射的超声波还未到达地面就发生了反射,影响测量结果。为解决此问题设计了一种非刚性接触地面仿形装置。
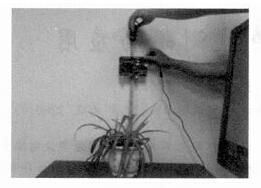
图1 超声波传感器模拟测量地面试验
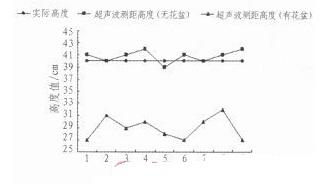
图2 超声波测距试验结果
2非刚性接触仿形装置设计
2.1结构原理
仿形装置由地轮,导向管a,导向管b,焊接板,压簧,长螺杆,测量基准板等组成。压簧嵌套在长螺杆上,并始终运动于两导向管之间,导向管b随着地面的起伏在导向管a内上下滑动,活动距离为335 cm,导向管a和导向管b之间连接有六角头螺栓,限制了导向管b绕长螺杆轴线方向转动的的自由度,更好的起到了导向作用。超声波传感器安装在超声波测量基准板上方,测量超声波传感器距离测量基准板的距离可以得到机具作业深度的变化。
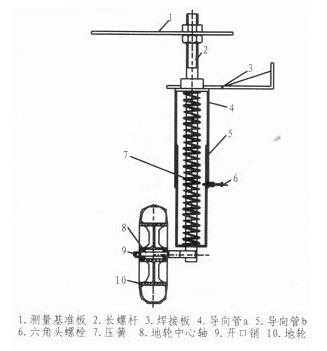
图3 非刚性接触地面仿形装置
2.2地轮滚动模型动力分析
根据车轮在平坦地面的运动、受力和只滚不滑的条件可以列出以下方程:
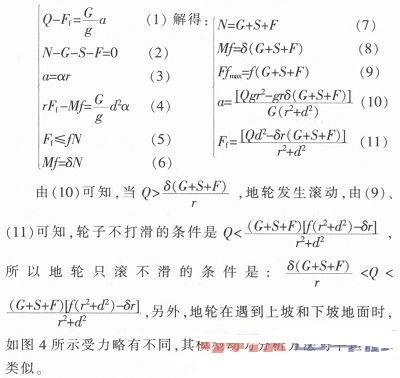
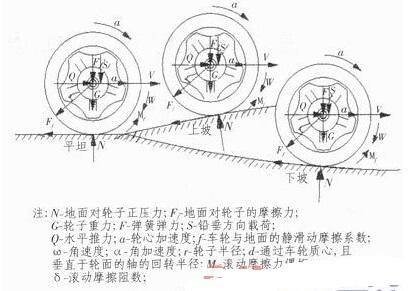
图4 地轮滚动受力分析
3电子控制系统设计
3.1系统硬件
超声波测距系统主要由硬件和软件2部分组成。硬件部分主要由超声波传感器、DC—DC电源模块、NEC单片机、LCD显示器等组成,以实现数据采集、存储、分析和显示等功能,其系统组成框图如图5所示。
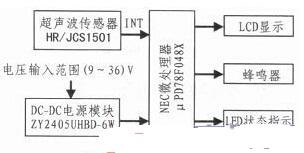
图5 系统硬件框图
3.1.1超声波传感器
超声波传感器安装在测量基准板上方,选用的是恒瑞天创公司的HR/JCS1501型测距元件,其供电电压为12 V/24 V,检测距离为精度为0.5%,输出方式为模拟信号:4~20 mA/0~5 V,声束角为10—15°,工作温度为-10—70℃。
3.1.2 DC—DC电源模块
在田间,单片机的工作环境比较复杂,干扰多,电源起伏变化,同时为了适应不同牵引拖拉机的电源输出,选用致远公司生产的ZY2405 UHBD-6W隔离DC—DC电源模块,为长宽压型,电压输入范围9~36 V,1 kV隔离单电源输出,对单片机控制系统的稳定性起到决定性的作用。
3.1.3主控制器
主控制器采用NEC公司的78K0/LF3系列8位单片微处理器μPD78F0483,内置高精度的环行震荡器,在-40—85°的时候精度可达到0.1%最多可以使用62个I/O端口,芯片内部集成32 KB FLASH存储器、1KB内部高速RAM,芯片资源满足设计需求。
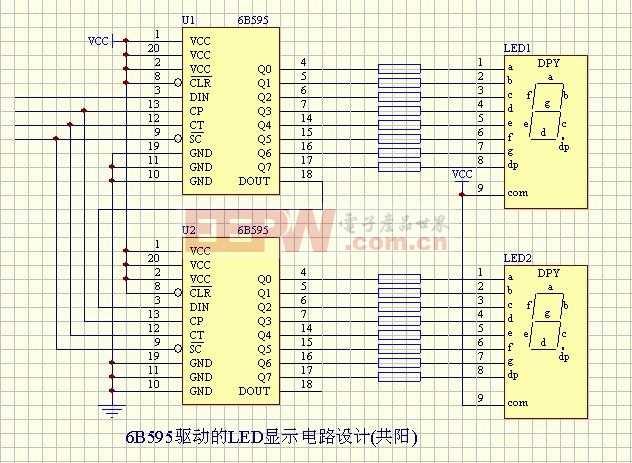
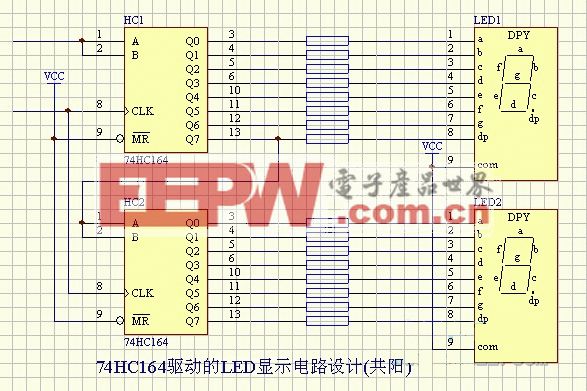
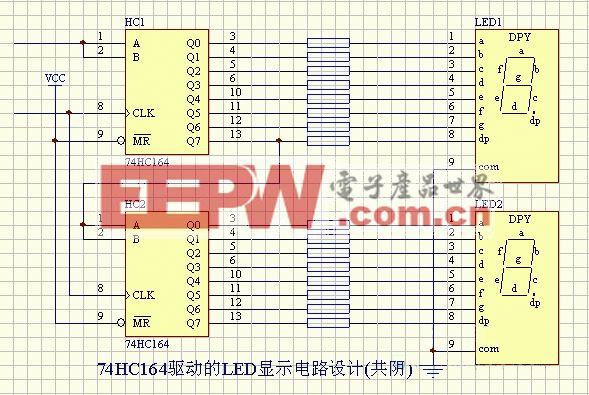
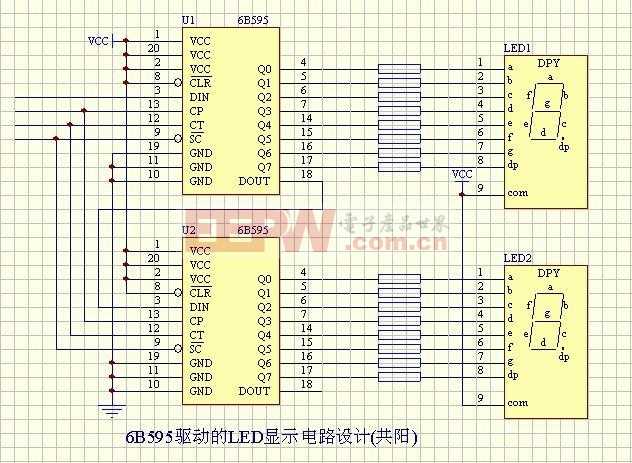
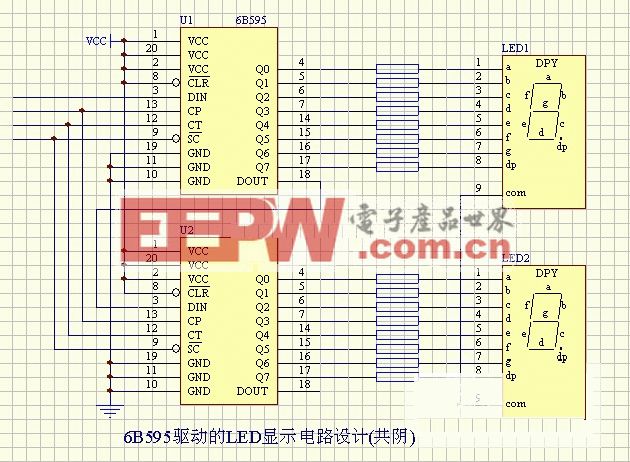
3.1.4 LCD显示与状态指示
显示采用LCD显示屏,显示设置菜单、运行实时参数和报警异常等信息。操作人员可以根据LCD显示器、蜂呜器和LED状态指示等声音和光的形式,随时调整机具作业深度。电路原理图如图6所示。
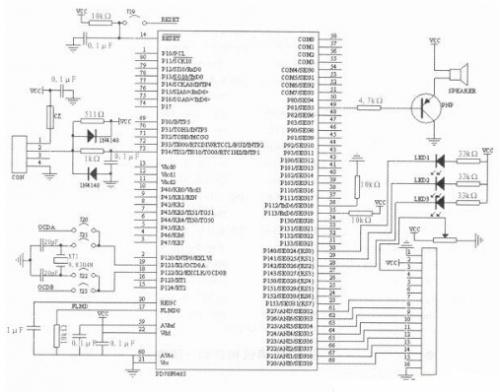
图6 主电路原理图
蜂鸣器相关文章:蜂鸣器原理




评论