一种无人值守地面传感器的系统设计

1 设计任务及采用的器件
1.1 设计任务
(1)设计出小型化的地面传感器系统,可在一定范围内识别人员、轮式和履带车辆目标,并发送识别结果到接收显示子系统。探测范围200-400米。
(2)技术参数:额定输入电压DC 12V,采用78M05转换出DC 5V的电压供DSP系统、无线收发模块和异步串口使用。
(3)具有系统自检和准确显示识别结果的功能。
1.2 采用的器件
采用TMS320VC5509A数字信号处理芯片作为地面传感器系统的主控芯片。TMS320VC5509A是一种高性能16位定点数字信号处理器,其资源可以完成震动和声信号采样和目标识别功能。传感器调理及放大电路的主要器件是美国TI公司生产的OPA4336。其他主要器件如下:
SDRAM(HY57V64 1 620ETP)、FLASH(Am29LV8OOD)、CPLD(EPM570T100C5N)、TL16C550C 。
2 系统硬件设计
地面传感器系统主要由DSP小系统、传感器的调理及放大电路、异步串口通信电路、无线收发模块四部分组成。此系统通过震动和声音传感器采集地面运动目标发出的信号,由传感器调理及放大电路送入DSP进行特征分析与识别,再将识别的结果通过异步串口传送给无线收发模块传回指挥所。系统硬件框架如图1图1硬件框架

2.1 传感器的选择
2.1.1 震动传感器。
选用小型化DX20动圈磁电式传感器作为地震动信号传感器。
2.1.2 声音传感器
选用733A01型声音传感器作为声音动信号传感器。
2.2 DSP小系统
DSP小系统的电源采用DC 5V和TLV1117-3.3及TLV1117-ADJ稳压芯片提供3.3V与1.6V两种电压,并用JTAG口硬件仿真并下载程序,SDRAM用于动态存储采集到的数据,FLASH保存DSP运行程序,待复位后重新载入DSP内部RAM中运行,CPLD负责外围器件的选择控制。DSP通过16根数据总线和14根地址总线通过CPLD与SDRAM、FLASH、串口进行通信。DSP怍为系统的核心,完成信号采集、过零数分析、短时能量分析、动态时间规整算法(DTW)等处理过程。
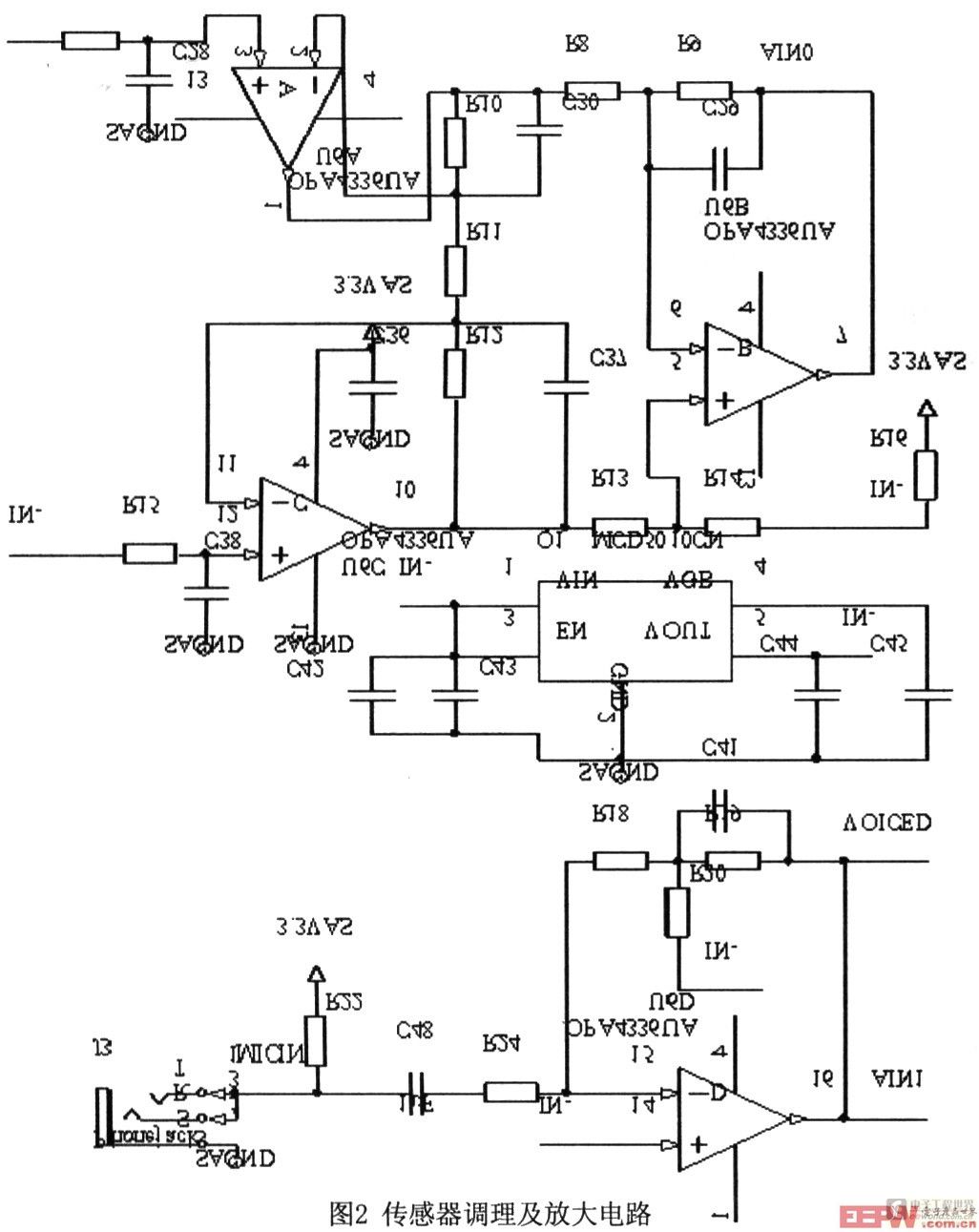
2.3 传感器调理及放大电路
地震动传感器应能探测到200m以内的运动车辆及20m以内人员脚步的信号,声音传感器则能感受到600m以内的车辆噪声。如此远距离条件下,由传感器检测得到的目标信号很微弱,通常只有mV级。如此小的信号必须先经过前置放大和预处理后才能进行采集处理。另外,由于小型化的要求,信号放大处理电路功耗应尽量小。设计一种低功耗、低噪声、高增益放大电路,是本系统的关键技术之一。考虑到地震动信号的频率均为150 Hz以下,而车辆运动时的噪声频率在250Hz左右,所以在放大器的基础上添加了低通滤波电路(如图中C28、C38)以进一步抑制环境噪声。
OPA4336提供了4个独立的放大器。系统放大电路由两级组成:两个对称的同相放大器U6A和U6C构成第一级,U6B为第二级差动放大器,U6D是声音放大器。传感器的调理及放大电路如图2所示。


评论