基于占空比模糊控制的光伏发电系统MPPT技术
2.2 算法实现
2.2.1 确定输入和输出变量的模糊子集及论域
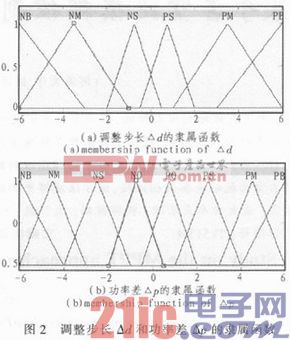
将语言变量分别定义为8个和6个模糊子集,即△p={NB,NM,NS,NO,PO,PS,PM,PB};△d={NB,NM,NS,PS,PM,PB}。其中:NB,NM,NS,NO,PO,PS,PM,PB分别表示负大,负中,负小,负零,正零,正小,正中,正大等模糊概念。并将论域规定为13个等级,即:△p={-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6};△d={-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6}。
2.2.2 确定隶属函数
选择常用的三角形隶属函数,占空比调整步长△d和功率差△p的隶属度函数分别如图2所示。
2.2.3 模糊决策表
根据占空比扰动观察法的原理,当前时刻的占空比调整步长△D(n)是由功率差△P和前一时刻的占空比调整步长△D(n-1)的变化量决定的。依据光伏阵列P-V特性曲线的分析,并考虑外界环境因素对光伏阵列输出特性的影响,得到以下调整占空比步长△D(n-1)的原则:
1)如果输出功率增加了,则继续按原来步长方向调整,否则,向相反方向调整;
2)在最大功率点附近时,采用较小的调整步长,减少跟踪时的功率损失;离最大功率点较远时,采用较大的调整步长,以加快跟踪速度。
3)当温度和光照强度等外界因素突然变化使得光伏阵列的输出功率发生较大变化时,系统能迅速地作出反应。
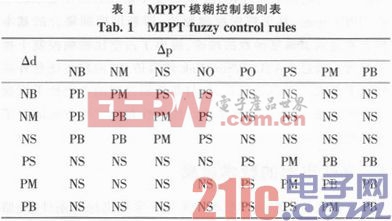
遵循上述原则,应用If A and B then C的模糊规则,模糊规则表如表1所示。
2.2.4 反糊方法
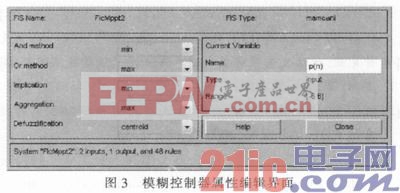
在模糊控制编辑器中,模糊推理采用成熟且容易成功实现的Mamdani推理法,“交”方法为min,“并”方法为max,推理方法为min,聚类方法为max,反模糊方法选择具有较高精度的重心法,如图3所示。
3 仿真分析
外界环境条件为:光照强度S=1 000 W/m2,环境温度T=25℃。负载阻值R=50 Ω。量化因子:Ka=0.005,Ke=2.0。采用固定步长为0.001,仿真器设置为ode3,运行时间为1 s。得到功率P和占空比D变化波形如图4所示。

从图4(a)的输出功率仿真波形可以得知:在Pm=157.3W,Dm=0.638,t=0.039 s左右,光伏阵列就工作在最大功率点,实现了最大功率点跟踪,并且功率波形平衡光滑,几乎没有振荡。仿真结果表明了模糊控制方法可以使光伏系统快速平稳地跟踪到最大功率点。

pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理
cvt相关文章:cvt原理
光伏发电相关文章:光伏发电原理






评论