基于占空比模糊控制的光伏发电系统MPPT技术
目前实现MPPT的方法有恒定电压(CVT)法,扰动观察(PO)法及增量电导(INC)法等。文中研究光伏发电系统中的MPPT问题,基于模糊控制理论,即利用模糊集合的基本概念和连续隶属度函数的理论,提出了占空比模糊控制干扰观察法。通过MATLAB/Simulink建模仿真,实现在任意外界环境下最大功率点的跟踪,并与非模糊控制的占空比干扰观察法相比较,结果表明该方法在快速性和稳定性方面取得了更好的效果。
1 光伏电池的数学建模
光伏电池模型通常要求仅采用厂家提供标准条件(光照强度Sref=1000W/m2,电池温度Tref=25℃)下的光伏电池板测试参数Isc、Uoc、Im、Um,并且要在满足工程精度的情况下尽可能地简化模型。
式中,Isc为标准条件下光伏电池的短路电流;Uoc为标准条件下光伏电池的开路电压;Im为标准条件下光伏电池的最大功率点电流;Um为标准条件下光伏电池的最大功率点电压。因此,只要知道这4个参数,就可以得到在标准条件下的光伏电池I—V特性曲线。
假定光伏电池特性曲线基本形状不变,根据标准条件下的Isc、Uoc、Im、Um和任意的光照强度、环境温度等参数,可以计算出任意外部环境下的Isc’、Uoc’、Im’和Um’,得到光伏电池模型:


2 占空比模糊控制实现MPPT
2.1 算法原理
基于占空比扰动观察法原理,目标量为:光伏阵列的输出功率P;控制量为:Boost电路的占空比D。
根据功率值变化量△P(n)=P(n)-P(n-1)和n-1时刻的占空比调整步长△D(n-1),决定当前时刻的调整步长大小△D(n)。光伏发电系统的模糊控制原理图如图1所示。
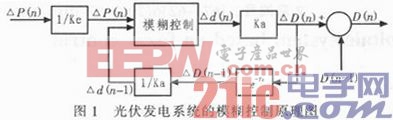
图1中,输入△P(n)表示第n时刻与前一时刻输出功率差的实际值,△p(n)表示△P(n)对应于模糊集论域中的值;输入△D(n-1)表示第n-1时刻占空比D调整步长的实际值,△d(n-1)表示△D(n-1)对应于模糊集论域中的值。输出△D(n)表示第n时刻占空比D调整步长的实际值,△d(n)表示△D(n)对应于模糊集论域中的值;D(n-1)表示第n-1时刻占空比的实际值,D(n)表示第n时刻占空比的实际值.e-Ts为一个单位延迟环节,Ke、Ka分别表示功率差和调整步长的量化因子。
在每一次寻优周期开始时,采样当前时刻的输出功率值P(n)和前一时刻调整步长△D(n-1),计算当前时刻P(n)和前一时刻P(n-1)的差值△P(n),并对△P(n)和△D(n-1)进行量化,得到模糊集论域中的变量△p(n)和△d(n-1),将其作为模糊控制器的输入,通过模糊推理得到当前时刻的调整步长△d(n),经重心法反模糊化后,得到控制量占空比调整步长△D(n)的实际值,再与当前时刻的占空比D(n-1)相加得到下一时刻的占空比D(n),调整光伏阵列的输出电压和功率,然后就进入下一次的寻优周期。不断重复上述过程,直到输出功率差△P(n)达到精度要求,即,到达了光伏系统的最大功率点。

pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理
cvt相关文章:cvt原理
光伏发电相关文章:光伏发电原理






评论