惯性变化时无刷直流电机的鲁棒控制器设计

1 引言
随着电力电子技术和先进电机控制理论的发展,无刷直流电机(bldcm)得到了广泛应用。确定无刷直流电机调速性能优劣的重要指标就是快速性、稳定性和鲁棒性。传统的无刷直流电机调速系统一般采用双闭环控制,内环为电流环,外环为速度环,控制策略一般采用pi/pid控制。随着控制技术的迅猛发展,现在已有很多先进控制策略被应用于无刷直流电机的调速中[1][2][3]。
鲁棒控制器对系统参数变化不敏感,因此它能保证系统的稳定性和好的动态性能。鲁棒控制器采用q参数化理论,可以有以下几个方面的优点:稳定的控制器总是存在、闭环极点能配置在左半平面的指定区域以保证所需要的动态响应、所有稳定的控制器都可以由一个独立的参数q来描述。该理论已成功地应用于诸多控制等领域[4][5][6][7][8]。本文采用q参数化理论,设计了无刷直流电机的鲁棒控制器。仿真结果表明:当参考速度、负载转矩和电机惯性参数发生变化时,本文提出的控制器都具有响应速度快、跟踪误差小、干扰抑制能力强、调速效果好等特点。
2 无刷直流电机模型
以一台三相桥式y接无刷直流电机为例,假设:忽略齿槽效应,绕组均匀分布;忽略磁路饱和,不计涡流和磁滞损耗;不考虑电枢反应,电机反电势为梯形波。则电机的状态方程为[9]:  (1)
(1)
其中:p为微分算子,l 为绕组自感,m为绕组互感,ia,ib,ic分别为三相相电流,va,vb,vc为三相相电压,ea,eb,ec为三相反电势。
电磁转矩方程为
te=(eaia+ebib+ecic)/ωr (2)
运动方程为
pωr =( te – tl-bωr)/j (3)
式中ωr为电机的角速度;b为阻尼系数;j为转动惯量;tl为负载转矩。
在s-域重写方程(3)为
ωr=gp(s)( te(s)-tl(s)) (4)
式中![]() (5)
(5)
根据以上分析,基于鲁棒控制的无刷直流电机控制系统框图如图1所示。
图中的速度控制器k(s)利用q-参数化理论来设计,以消除一些传统的控制器不容易解决或解决效果不好的问题。
3 控制器设计
3.1 单参数控制器设计
q-参数化理论[10]指出:对于一个给定的单输入、单输出机械系统(包含驱动系统),其所有的稳定控制器均可用一个独立参数q来描述。图1中的控制器即为一个单参数控制器,用来控制由式(5)所描述的系统。图1中,u1=ωr*为参考输入信号,u2= n是传感器噪声,u3=tl为负载转矩,is*为控制器的输出,ωr为待调节的系统输出,k(s)为一个稳定的控制器。为了描述gp(s)的所有稳定的控制器k ,我们首先建立gp(s)的一个双互质分解,如下述公式所示。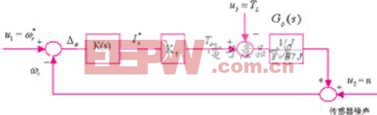
图1 无刷直流电机驱动的控制系统框图![]() (6)
(6) ![]() (7)
(7)![]() (8)
(8)
考虑由方程(5)所描述的被控对象,这里gp(s)。将ktgp(s)用状态空间形式描述,则有:![]() (9)
(9)
式中ag,bg,cg的值由下述方程决定:
ag=-b/j
bg=1
cg=kt/j
根据上述分析结果,可以得到的计算式如下: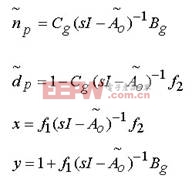
这里f1和f2的选择必须使得和是hurwitz的。
综上所述,控制器传递函数用ktgp(s)和q描述则为: (10)
(10)
3.2 控制器的设计约束
以ωr作为输出,u1,u2,u3作为输入,则可得相应的闭环传递函数分别为: ![]() (11)
(11)![]() (12)
(12)![]() (13)
(13)
本文所设计的控制器必须满足以下一些设计约束:
(1)跟踪性能:输出速度(ωr)必须能够跟踪其参考输入(ωr*),即满足:![]()
要满足上式,则需选择q使得的直流增益为1,即。

pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理




评论