一种改进型串级调速系统的研究与设计

1 引言
三相异步电机拖动的风机和水泵耗电量占全国发电总量的40%以上。目前大多数的风机水泵采用阀门、挡板或其它低效调速方法来调节流量满足负载要求,浪费电能严重。因而高效节能调速具有重要的经济和社会效益。在高效节能调速方面有串级调速、变频调速两种,两者的区别是变流控制装置控制点不同。变频调速控制电机的定子侧,而串级调速控制电机的转子侧。变频装置需要承受供电电压和全部功率,因而在低压小容量电机上广泛应用,大容量电机上则存在诸多问题 [1]。而串级调速承受的转子电压和比额定功率小得多的转差功率,因而在高压大容量电机调速上具有突出的优势。本文对传统的串级调速系统进行了研究,并针对其缺点进行了改进,提出了一种改进串级调速系统的设计方案。
2 传统串级调速系统的工作原理分析
传统的串级调速系统将绕线电机的转子回路通过变流器及逆变变压器与电网相连[2]。如图1所示。
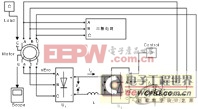
图1 串级调速系统示意图
图1中U1为三相不控整流装置,U2为三相可控整流装置,L为平波电抗器。绕线电机转子的相电动势sEr0经U1整流输出直流电压Vd。U2提供可调直流电压Vi作为电机调速所需要的附加直流电动势外,还可以将U1整流输出的转差功率逆变,通过逆变变压器回馈到电网。不考虑电机转子与变压器绕组内阻以及晶闸管换相重叠角压降的影响,可以写出转子直流回路的电压平衡方程式:![]() (1)
(1)
或![]() (2)
(2)
式中K1、K2分别为U1和 U2装置电压的整流系数,V2为变压器的二次相电压,α为U2装置的逆变角,R为转子直流回路总电阻。由电机学可知,转子电流方程为: (3)
(3)
CT与电机结构参数有关的常数;Φm是电机主磁通,电机供电电压稳定时,近似为常数;cosΦ2为转子功率因数,当电机稳定运行时,转差率变化不大,因此转子电流Ir近似与转速无关,与电机负载大小有直接关系。下面从起动、调速与停车三种情况分析系统工作原理。
(1)起动
电动机起动时要有足够大的转子电流或足够大的整流后的直流电流Id。由式(2)可知,控制α使Vd与Vi有足够大的差值来产生满足启动需要的电流Id,但不超过额定值。这样电机在一定转矩下加速起动,随着转速的提高,转子电动势减小,增大α角以减小Vi值来维持起动电流的恒定,当达到期望的转速时,不再调整α角,电机在此转速下稳定运行。
(2)调速
控制α角的大小就可以调节电动机的转速。当增大α角时,由式(2)可知逆变电压就会减小,Id将增大,电磁转矩也将增大,使电机加速。随着电机转速提高,转子相电动势减小,Id减小,直到产生新的平衡,电机在增高了的转速下稳定运行。同理,减小α角可以使电机在降低的转速下稳定运行。
(3)停车
电机停车有制动停车和自由停车两种。因为U1为不控整流装置,因此不能依靠转子侧输入功率实现电气制动,只能靠减小α角逐渐减速,依靠负载转矩停车。
3 改进型串级调速系统的分析设计
传统串级调速系统控制晶闸管的触发角实现无级平滑调速,把绕线电机的转差功率回馈给电网,提高系统效率。但是存在明显的缺点:不能通过转子侧输入功率实现电气制动;逆变器的移相角随着调速范围变化而变化,当移相角比较大时,逆变器从电网吸收的无功功率比较多,因而系统功率因数比较低,同时谐波含量也比较大;图1中的变压器主要作用是取得能与转子电压相匹配的逆变电压,随着系统调速范围的变宽,该变压器容量也需要增大,增加了系统的体积与成本[3]。因此,需要对传统串级调速系统进行改进。
为了实现绕线电机转子侧输入电功率制动,将图1中的U1不控整流单元设计为能够工作在有源逆变的可控整流单元。因为在大功率条件下,晶闸管的性价比明显好于MOSFET,因此可控整流单元采用晶闸管作为功率开关器件。因为晶闸管的单向导电性,用一个电流方向始终恒定、大小可变的恒流源作为电能在电网与电机间的传递装置。改进后的串级调速系统如图2所示。
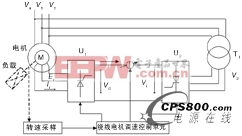
图2 改进型串级调速系统原理图
(1)起动
当绕线电机启动时,转差功率从转子侧流向电网,此时设置U1的触发角α90°,为了提高功率因数,减少电流谐波含量,防止转矩抖动,可设α=0°;U2的逆变角β90°,为增大转矩,同时保证晶闸管可靠换流,设置β=30°,此时V1和V2均大于0,通过设定恒流源电流值为额定值,实现最大转矩启动。
(2)调速
因为U1、U2单元的控制角不变,调节恒流源电流值,必然引起转子电流的Ir改变,当电机在某转速n0下稳定运行,此时转子电流为Ir0。增大恒流源电流值,转子电流也增大,电磁转矩变大,电机加速,转子电压降低,转子电流减小。当电机转速达到期望值n1时,控制单元通过控制恒流源电流值使转子电流仍为Ir0,此时电机在提高的转速n1下稳定运行。同理,反之可以实现电机转速降低。次同步调速时,转差功率为正,从转子侧流向电网;超同步调速,转差功率为负,从电网流向电机。因为电机超同步运行用来满足某些特殊负载,同时对电机要求比较高,应用范围比较窄。
(3)停车
当电机制动时,转子侧从电网吸收能量。设置U1逆变角β=30°,U2触发角α=0°。此时V1和V2均小于0,V1与转子电流的夹角θ90°,此时电机输入功率为负,电机处于发电状态,将电机轴上的机械能及转子侧传入的电能由定子侧传入电网,并产生制动转矩加快停车,通过恒流源实现电气制动。
改进型串级调速系统与传统串级调速系统相比,具有以下优势:
(1)不需要实时调节晶闸管的触发角,而是通过恒流源控制实现调速,使系统功率因数大大提高,同时减小了逆变变压器体积,节约了系统空间,降低了成本;
(2)由于系统拓扑的改变,实现了电机四象限运行,既可以次同步调速,也可以实现超同步调速,而且能够实现电气制动;
(3)通过恒流源直接控制转子电流,使调速精度大大提高;
(4)转子直流回路电阻减小,使系统机械特性增强。
随着电机转速的改变,转子侧的相电动势的幅值、频率是变化的,因此必须使U1的触发脉冲与转子侧相电动势保持同步。数字移相触发器具有控制精度高,输出脉冲不对称度小等优点[4]。因此,采用数字移相触发器产生转子侧晶闸管所需要的6路触发脉冲,如图3所示。当U1工作于整流状态时,触发角α=0°,转子采样电压经过过零比较器,产生方波进入移相器。当信号为高时,移相器输出高电平,输入信号为低时输出为低电平。双窄脉冲发生器根据晶闸管的导通顺序产生双脉冲,经驱动器放大后,送至晶闸管的门极。当U1工作于逆变状态时,逆变角β=30°,移相器输入信号为高电平时,计数器1清零后计数至输入信号达低电平为止,设计数值为nT,此时输出为低电平;输入信号为低电平时,计数器2清零后计数至nc,然后输出高电平至双窄脉冲发生器,产生6路触发脉冲,经驱动器放大后控制晶闸管。因为转子相电动势上半周期与下半周期宽度变化不大,所以。

图3 数字式移相触发器原理图
4 两种调速系统的仿真与比较分析
根据前面所述的传统与改进型串级调速系统的原理,以绕线式异步电动机YZR-355-L1-10作为研究对象,利用MATLAB软件分别构建仿真模型如图4和图5所示。绕线电机YZR-355-L1-10其铭牌参数如下:功率P=110kW,极对数p=5,额定电压UN=380V、额定电流IN=217A、额定频率fN=50HZ、额定功率因数cosφ=0.88、额定转速nN=582 r/min、额定转矩TN=1804 n.m、转动惯量J=17.08 kg.m2、空载电流104.3A、重量1764kg。
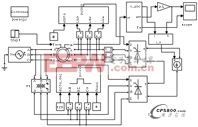
图4 改进型串级调速系统仿真模型
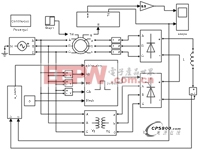
图5 传统串级调速系统仿真模型
在负载转矩为600n.m时,对传统与改进型串级调速系统启动进行仿真,启动电磁转矩如图6所示。可以看出,尽管启动时间基本相同,但是改进型串级调速系统启动时电磁转矩大于传统串级调速系统,而且转矩平滑。因此当负载变大时,改进型串级调速系统启动速度要比传统的快。
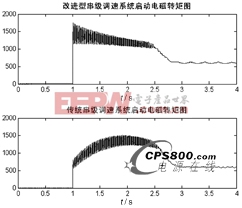
图6 改进型与传统串级调速系统启动转矩图

图7 改进型与传统串级调速系统制动转速图

图8 改进型串级调速系统电气制动电磁转矩图
在负载为300n.m条件下,电机启动并达到额定转速,4秒时,改进型串级调速系统通过改变转子侧和电网侧晶闸管的触发角实现电气制动,传统串级调速系统通过断电实现自然制动。两个系统制动时的转速图如图7所示,显然改进型串级调速系统的制动速度快于传统串级调速系统。改进型串级调速系统的电磁转矩图如图8所示,此时绕线电机的电磁转矩作用方向与转速方向相反,电机处于回馈制动状态。电机轴上输入的机械功率转换成电功率回馈到电网中。
综合分析,改进型的串级调速系统启动转矩大于传统串级调速系统,启动时间快,而且能够实现回馈制动,减小了制动时间,提高了生产效率。
5 结论
本文针对传统串级调速系统不能实现电气制动的不足进行了改进,并通过仿真验证了方案的可行性,为实现大功率绕线电机在频繁启动、制动的工作环境下的节能调速提供了理论依据。
参考文献
[1] 王玉彬. 电机调速及节能技术. [M] 中国电力出版社. 2008
[2] 陈伯时. 电力拖动自动控制系统——运动控制系统[M]. 机械工业出版社, 2009
[3] 郭建军. 串级调速发展与现状. 装备制造技术. 2008(7):110-111
[4] 冯晖, 林争辉. 三相全数字移相触发电路. 国外电子元器件. 2002(3): 21-23
作者简介
张兴起(1984 --),男,河北唐山,硕士研究生,主要从事港口大型电机节能控制系统的研究。■

评论