高频开关电源控制方案设计

1电压电流双环控制
本文引用地址:https://www.eepw.com.cn/article/231342.htm为了实现输出电压电流均可控,通常采用电流模式控制,常用电流模式控制有峰值电流控制法和平均电流控制法。但是,峰值电流控制有以下几个缺点[1]:
①占空比大于50%的开环不稳定性,存在难以校正的峰值电流与平均电流的误差;
②闭环响应不如平均电流模式控制理想;
③容易发生次谐波振荡,即使占空比小于50%,也有发生高频次谐波振荡的可能性。因而需要斜坡补偿;
④对噪声敏感,抗噪声性差。因为电感处于连续储能电流状态,与控制电压编程决定的电流电平相比较,开关器件的电流信号上斜坡通常较小,电流信号上的较小噪声很容易使开关器件改变关断时刻,使系统进入次谐波振荡。
2平均电流模式控制PWM
平均电流模式采用双闭环控制,其内环控制输出滤波电感电流,外环控制输出电压,提高了系统响应速度。图1为平均电流模式控制PWM的原理图。
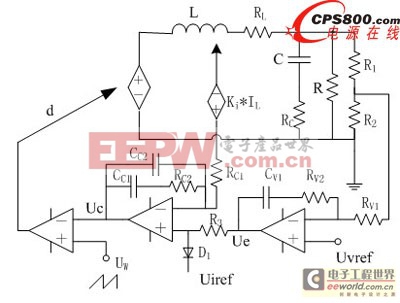
图1平均电流模式控制原理图
将误差电压信号Ue接至电流误差信号放大器的同相端,作为输出电感电流反馈的控制信号Uip。将带有锯齿纹波状分量的输出电感电流反馈信号Ui,接至电流误差信号放大器的反相端,跟踪电流控制信号Uip。Ui与Uip的差值经过电流误差放大器放大后,得到平均电流跟踪误差信号UC。再由UC与三角锯齿波信号通过比较器比较得到PWM控制信号。UC的波形与电流波形Ui反相,所以,是由UC的下斜坡(对应于开关器件导通时期)与三角波的上斜坡比较产生控制信号。显然,这就无形中增加了一定的斜坡补偿。但为了稳定工作,要求电感电流的下降坡度不能大于晶振的坡度。








4控制电路实现
采用集成芯片UC3525外加运放构成平均电流模式控制电路,并用单片UC3535外加逻辑电路的方式形成有限双极性控制的4路控制信号。如图6所示。
(1)外环控制
电压给定信号与输出电压反馈信号经运放U1补偿比较得Ue,接到UC3525的内部误差放大器正相输入端:2脚作为反馈电流的控制信号Uip。当输出电流超过给定限流值时,D11导通,Uip被嵌在给定限流值上。
(2)内环控制
采样电阻检测输出电流并通过电流检测放大器得电流反馈信号。接到UC3525的内部误差放大器反相输入端的1脚,与Uip进行比较。UC3525的9脚为反馈补偿端。
(3)有限双极性控制
UC3525的4脚为同步信号输出,该信号作为D触发器U3的时钟信号,U3的Q端(1脚)和端(2脚)既可得到占空比为50%相位相差180°的两组脉冲,Q11、Q12用于控制死区时间。
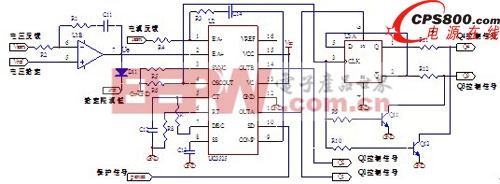
图6单片UC3525构成有限双极性控制原理图
5结论
通过以上设计,对高频开关电源控制的一些关键问题得到了基本解决办法,高频开关电源控制电路的实现,使发电厂及变电站大容量直流系统能够更加可靠的运行。
参考文献
[1]林渭勋.现代电力电子电路.浙江大学出版社.2004
[2]高海生,张前彬等.110V大功率高频开关电源的研制.华东交通大学学报.2004(10):1-4
[3]姜桂宾,裴云庆等.12V/5000A大功率软开关电源的设计.电工电能新技术.2003(1):56-60
[4]陆鸣,杨恒等.自动均流技术及负载均流集成电路控制器UC3907.电子技术.1996(10):27-30
[5]张胜辉,郭海军等.并联均流高频开关电源的研究.国外电子元器件.2004(11):20-22■












评论