电压、电流的反馈控制模式

现在的高频开关稳压电源主要有五种PWM反馈控制模式。电源的输入电压、电流等信号在作为取样控制信号时,大多需经过处理。针对不同的控制模式其处理方式也不同。下面以由VDMOS开关器件构成的稳压正激型降压斩波器为例,讲述五种PWM反馈控制模式的发展过程、基本工作原理、电路原理示意图、波形、特点及应用要`氪,以利于选择应用及仿真建模研究。
(1)电压反馈控制模式
电压反馈控制模式是20世纪60年代后期高频开关稳压电源刚刚开始发展而采用的一种控制方法。该方法与一些必要的过电流保护电路相结合,至今仍然在工业界被广泛应用。如图1(a)所示为Buck降压斩波器的电压模式控制原理图。电压反馈控制模式只有一个电压反馈闭环,且采用的是脉冲宽度调制法,即将经电压误差放大器放大的慢变化的直流采样信号与恒定频率的三角波上斜坡信号相比较,经脉冲宽度调制得到一定宽度的脉冲控制信号,电路的各点波形如图1(a)所示。逐个脉冲的限流保护电路必须另外附加。电压反馈控制模式的优点如下。
①PWM三角波幅值较大,脉冲宽度调节时具有较好的抗噪声裕量。
②占空比调节不受限制。
③对于多路输出电源而言,它们之间的交互调节特性较好。
④单一反馈电压闭环的设计、调试比较容易。
⑤对输出负载的变化有较好的响应调节。
电压反馈控制模式的缺点如下。
①对输入电压的变化动态响应较慢。当输入电压突然变小或负载阻抗突然变小时,因为主电路中的输出电容C及电感L有较大的相移延时作用,输出电压的变小也延时滞后,而输出电压变小的信息还要经过电压误差放大器的补偿电路延时滞后,才能传至PWM比较器将脉宽展宽。这两个延时滞后作用是动态响应慢的主要原因。
②补偿网络设计本来就较为复杂,闭环增益随输入电压而变化的现象使其更为复杂。
③输出端的LC滤波器给控制环增加了双极点,在补偿设计误差放大器时,需要将主极点低频衰减,或者增加一个零点进行补偿。
④在控制磁芯饱和故障状态方面较为麻烦和复杂。
改善及加快电压模式控制动态响应速度的方法有两种:一种是增加电压误差放大器的带宽,以保证其具有一定的高频增益。但是这样容易受高频开关噪声干扰的影响,需要在主电路及反馈控制电路上采取措施进行抑制或同相位衰减平滑处理。另一种是采用电压前馈控制模式。电压前馈控制模式的原理图如图1(b)所示。用输入电压对电阻、电容(Rt、Ctt)充电,以产生具有可变化的上斜坡的三角波,并且用它取代传统电压反馈控制模式中振荡器产生的固定三角波。此时输入电压变化能立刻在脉冲宽度的变化上反映出来,因此该方法明显提高了由输入电压的变化引起的动态响应速度。在该方法中对输入电压的前馈控制是开环控制,而对输出电压的控制是闭环控制,目的是增加对输入电压变化的动态响应速度,故这是一个由开环和闭环构成的双环控制系统。
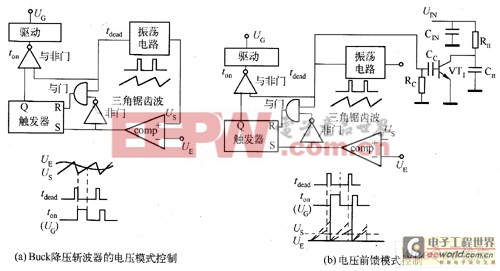
图1电压模式控制原理图
(2)峰值电流反馈控制模式
峰值电流反馈控制模式简称峰值电流控制模式,它的概念出现在20世纪60年代后期,来源于原边具有电流保护功能的单端自激式、反激式高频开关稳压电源。20世纪70年代后期才开始从学术上对其进行深人的建模研究。直至20世纪80年代初期,第一批峰值电流控制模式集成电路(UC3842、UC3846)的出现,使得峰值电流控制模式迅速得到了推广应用,它主要用在了单端及推挽电路方面。近年来,由于大占空比所必需的同步不失真斜坡补偿技术在实现上的难度及抗噪声性能差,峰值电流控制模式面临着改善性能后的电压控制模式的挑。如图2所示,将误差电压信号UE送至PWM比较器后,并不是像电压控制模式那样与由振荡电路产生的固定三角波状电压斜坡信号进行比较,而是与一个变化的其峰值代表输出电感电流峰值的三角状波形或梯形尖角状合成波形信号叱比较,然后得到PWM脉冲的关断时刻。因此峰值电流控制模式不是用电压误差信号直接控制PWM的脉冲宽度,而是直接控制峰值输出侧的电感电流的大小,然后间接地控制PWM的脉冲宽度。
峰值电流控制模式是一种用固定时钟开启、关断峰值电流的控制方法,这是因为峰值电感电流容易检测,而且其在逻辑上与平均电感电流大小的变化相一致。但是,峰值电感电流的大小不能与平均电感电流的大小一一对应,因为在占空比不同的情况下,相同的峰值电感电流的大小可以对应不同的平均电感电流大小。而平均电感电流的大小才是唯一决定输出电压大小的因素。在数学上可以证明,将电感电流下斜坡斜率的至少一半以上的斜率加在实际检测电流的上斜坡上,可以去除不同占空比对平均电感电流大小的扰动作用,使得所控制的峰值电感电流最后收敛于平均电感电流。因而合成波形信号UΣ要由斜坡补偿信号与实际电感电流信号两部分合成构成。当外加斜坡补偿信号的斜率增加到一定程度时,峰值电流控制模式就会转化为电压控制模式。若将斜坡补偿信号完全用振荡电路的三角波代替,就成为了电压控制模式,只不过此时的电流信号可以认为是一种电流前馈信号,如图2所示。当输出电流减小时,峰值电流控制模式就从原理上趋向变为电压控制模式。当电路处于空载状态,输出电流为零,并且斜坡补偿信号幅值比较大时,峰值电流控制模式实际上就变为了电压控制模式。
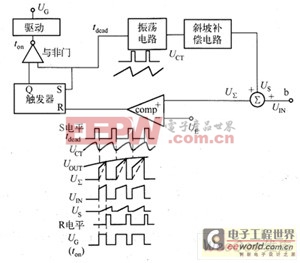
图2 峰值电流反馈模式控制原理图
峰值电流控制模式是双闭环控制系统,即电压外环控制和电流内环控制。电流内环是瞬日巾决速按照逐个脉冲工作的。在该双环控制中,电流内环只负责输出电感的动态变化,因而电压外环仅需控制输出电容,不必控制LC储能电路。基于这些特点,峰值电流控制模式具有比电压控制模式大得多的带宽。峰值电流控制模式的优点如下。
①暂态闭环响应较快,对输入电压的变化和输出负载的变化的动态响应均很快。
②控制环易于设计。
③输入电压的调整可与电压控制模式的输入电压前馈技术相媲美。
④具有简单、自动的磁通平衡功能。
⑤具有瞬时峰值电流限流功能,即内在固有的逐个脉冲限流功能。
⑥具有自动均流并联功能。
峰值电流控制模式的缺点如下。
①占空比大于50%时开环不稳定性,存在难以校正的峰值电流与平均电流的误差。
②闭环响应不如平均电流控制模式理想。
③容易发生次谐波振荡,即使占空比小于50%,也有发生高频次谐波振荡的可能性,因而需要斜坡补偿。
④对噪声敏感,抗噪声性差。因为电感处于电流连续工作状态,与控制电压编程决定的电流电平相比较,开关器件的电流信号的上斜坡通常较小,电流信号上有较小的噪声就很容易使得开关器件改变关断时刻,从而使系统进入次谐波振荡状态。
⑤电路拓扑受限制。
⑥对多路输出电源的交互调节特性不好。
(3)平均电流控制模式
平均电流控制模式的概念产生于20世纪70年代后期。平均电流控制模式集成电路出现在20世纪70年代初期,并成功应用在了20世纪70年代后期的高速CPU专用的具有高di/dt动态响应供电能力的低电压、大电流高频开关稳压电源中。如图3(a)所示为平均电流控制模式的原理图。该电路将误差电压%接至电流误差信号放大器(e/a)的同相端,以作为输出电感电流的控制编程电压信号Ucp(cp为current-program的缩写);将带有锯齿纹波状分量的输出电感电流信号UIN接至电流误差信号放大器(e/a)的反相端,代表跟踪电流编程信号Ucp的实际电感平均电流。UIN与UCP的差值经过电流放大器(e/a)放大后,得到平均电流跟踪误差信号UCA,再由VCA及三角锯齿波信号UT或US通过比较器比较后得到PWM关断信号。UCA的波形与电流波形UIN反相,所以是由UCA的下斜坡(对应于开关器件的导通时期)与三角波UT或US的上斜坡比较产生关断信号的。显然这无形中增加了一定的斜坡补偿。为了避免次谐波振荡,UCA的上斜坡不能超过三角锯齿波信号UT或US的上斜坡。平均电流控制模式的优点如下。
①平均电感电流能够高度精确地跟踪电流编程

基尔霍夫电流相关文章:基尔霍夫电流定律
电路相关文章:电路分析基础
dc相关文章:dc是什么
pwm相关文章:pwm是什么
lc振荡电路相关文章:lc振荡电路原理

评论