足球机器人电磁击球系统设计

足球机器人(又称智能足球机器人)是近几年国际上迅速开展起来的一项高技术对抗活动,它涉及人工智能、机械、自动化、计算机、信号处理、无线通信、传感、精密机械等领域的前沿学科研究[1]。足球机器人在比赛中采用全视觉和无线通信方式,由双方的主控机控制的足球机器人在特定的场地进行全自主模式比赛,既是一个典型的智能足球机器人系统,又是一个多机器人之间合作和对抗的生动的研究模型。其中的理论技术可应用于国防事业、工业生产、救援、教育等领域,从而有效推动国家科技、经济和安全等各方面的发展。
机器人踢球和人踢球的最大共同点都是队员能够越过对方的阻碍,顺利地把球踢进对方的球门。要想完成机器人能像球星那样灵活地踢球和运球,一个功能完备的踢球(击球)系统必不可少。因此,设计击球系统对于足球机器人的射门和传接球具有重要意义。
1 电磁击球机构与击球电磁铁的设计
1.1 电磁击球机构工作原理
电磁击球机构是目前足球机器人击球机构中最为普遍的一种机构,其优点是力量大、动作频率高、反应速度快、机械结构相对简单可靠[2]。此处将电磁力作为足球机器人平射击球和挑射击球的动力,能够实现传球和击球射门的目的。足球机器人电磁击球机构设计如图1所示,主要包括复位弹簧、铁芯、平射击球线圈、支架、平射击球杆、挑射击球线圈、挑射器等。足球机器人前方无阻碍时采用平射方式传球或击球射门,当平射击球时,铁芯带动平射击球杆猛力向前击球,击球完毕铁芯在复位弹簧的作用下复位;足球机器人前方有阻碍时采用挑射方式,挑射击球线圈工作,带动挑射击球杆迅速向机器人后方移动,使挑射器围绕转轴转动,完成挑射击球过程。挑射击球完毕在复位弹簧的作用下复位,挑射击球将球越过前方足球机器人,达到带球过人(足球机器人)的目的。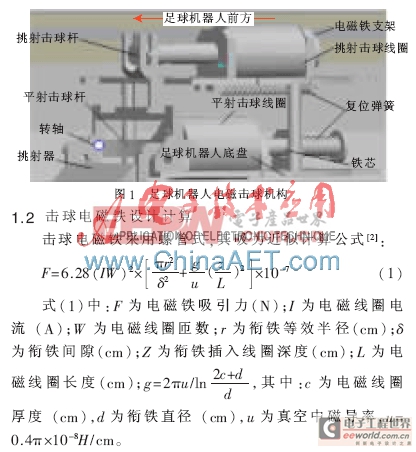
由式(1)可知,增加线圈匝数和电流,可以增加螺管式电磁铁的吸引力;选用磁导率高、磁滞损耗小的软磁材料的衔铁也是提高吸引力的一个重要因素。
挑射击球电磁铁和平射击球电磁铁使用相同的电磁铁,通过控制电磁线圈导电时间调节击球力度[3],分别带动挑射击球杆和平射击球杆,完成挑射击球和平射击球的动作。
2 升压模块设计与实现
电池是足球机器人行动的能源,采用12 V、1 800 mAh的锂电池供电。直接用电池给击球电磁铁供电,在短时间内低电压供电源无法直接使球获得足够的动能,需要采用较高电压给直流电磁铁供电。本文采用DC-DC Boost高电压变换原理[4],对电源电压进行升压,升压电路如图2所示。
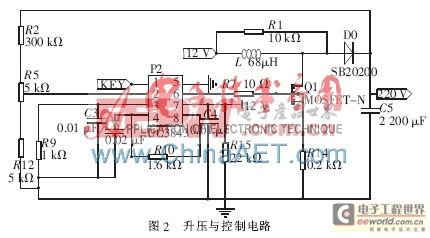
本文运用一种可产生脉冲宽带可调的集成控制芯片UC3843来实现控制电路的MOS管关断控制和电压升压。如图2所示:(1)调节R10可改变管脚6输出的PWM占空比大小,从而调节充电速度,占空比越大充电越迅速;(2)PWM脉冲频率f是由电阻R10与电容C6共同确定的(f=1.72/RC),通过调节R10和C6的比值能得到不同频率的PWM波;(3)管脚2是电压反馈端,当反馈电压超过2.58 V时,芯片就停止工作,因此可以调节电阻器R5的阻值控制UC3843的工作区域达到间接调节储能电容C5的充电电压。
充电过程开始时,通过使管脚KEY使能,PWM发生器开始工作。通过PWM发生器发生的持续脉冲驱动大功率MOS管,产生规律的开关特性作用,电感L在大功率MOS管导通时电流以指数形式增大,直到额定值为止;在大功率MOS管关断时,电流迅速降低为0,此时电感产生高幅值的感应电压脉冲。该电压脉冲通过二极管D0对储能电容C5充电,在多次往复充电后,储能电容上的幅值能接近电感的感应脉冲电压。为了使储能电容达到设计所需电压,可调节电位器R5的电阻值,将储能电容的电压反馈给PWM发生器,若反馈电压大于等于2.58 V,则PWM停止工作;反之,PWM发生器继续工作,储能电容电压增大。充电电压的时间是与电感系数特性相关的,与PWM发生器的输出占空比也是紧密联系的。
3 击球电磁铁驱动电路设计与控制
如图3所示为击球电磁铁驱动电路原理图,当足球机器人接收到上位机发送的平射击球或挑射击球的命令后,要迅速通过MOS管驱动芯片MC34152分别接通大功率MOS管的Q1、Q2,把储能电容两端的电压加在平射击球电磁铁线圈L1或挑射击球电磁线圈L2两端,通过平射电磁铁或挑射电磁铁的电磁效应完成击球动作。当击球完毕,立即断开储能电容和电磁铁线圈的连接,击球杆在复位弹簧的作用下回到原位。为防止电磁铁线圈在停止击球的瞬间产生的感应电流毁坏大功率MOS管,将二极管D1和D2分别与电磁铁线圈L1和L2并联形成回路。
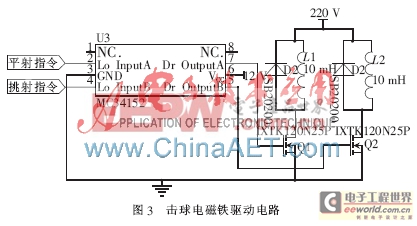
本文采用高速双MOSFET驱动器MC34152作为驱动芯片,此驱动器应用简单,不需要复杂的外围电路,只需要供给12 V电源即可工作;具有两个独立的大电流输出通道,可与COMS和LSTTL逻辑电路相容。另外,MC34152可对大容性负载快速充放电,对于1 000 pF负载,输出上升和下降时间仅为15 ns,逻辑输入到驱动输出的传输延迟(上升沿和下降沿)仅为55 ns。因此这种高速驱动芯片能够很好地对射门击球指令做出反应,保证击球效果的准确性和时效性。
4 试验及结果分析
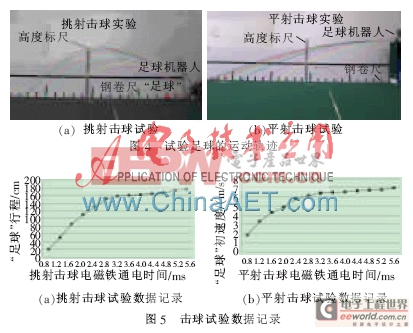
为了检验击球机构的设计效果,对足球机器人击球系统分别做了挑射击球和平射击球试验,并且运用运动目标实时跟踪测量系统(RTTS)对试验的实效视频进行跟踪测量,测量了“足球”运动轨迹、“足球”射程等。
通过控制PWM发生器使储能电容电压达到160 V,并控制击球电磁铁驱动使电磁铁导通时间在0.8 ms~5.6 ms范围内,分别对平射和挑射进行了试验研究,其运动轨迹试验结果如图4所示,图(a)是测试足球机器人挑射击球效果,图(b)是测试足球机器人平射击球效果,“足球”离开515 cm高的平射台后做平抛运动。如图4所示,在不同的电磁铁通电时间下,挑射击球和平射击球的“足球”轨迹不同。击球实验数据如图5所示。
由试验可知:
(1)在UC3843的PWM发生器控制芯片作用下的升压电路能够有效地产生大的直流电压,并且在充电达到设定值后能自动停止充电,避免了因充电电压过高引起元器件毁坏。
(2)足球机器人的击球力度能够通过击球电磁铁的通电时间来控制,在一定范围内通电时间越长,击球力度越大。
(3)平射击球杆、挑射击球杆和挑射器都对“足球”的速度有很大影响,铝合金在保证轻质量的同时又有一定的刚度,比铁的击球杆要好。
本文设计了一种有效、灵活的足球机器人击球系统,具有两种击球射门和传球方式,试验结果表明,所设计的升压模块电路可将直流电压12 V升压到160 V左右;所设计的驱动电路能实现挑射击球和平射击球,并且获得了180 cm的挑射行程和7 m/s的平射初速度,该足球机器人击球系统具有令人满意的击球效果。
参考文献
[1] 陈天华,郭培源.足球机器人的发展对产业和研究的意义[J].机器人技术与应用,2008(5):18-21.
[2] 余凯平,李永新,张杰,等.足球机器人用电磁击球设计及仿真分析[J].机械研究与应用,2007(1):77-79.
[3] 李尚荣,刘晶楼.基于SG3525的小型直流电磁铁升压与驱动电路设计[J].江苏技术师范学院学报,2009(2):28-32.
[4] 陈丽,邹庆化.一种低压DC-DC升压电路的实现[J].机电产品开发与创新,2010,23(3):158-160.

pwm相关文章:pwm是什么
负离子发生器相关文章:负离子发生器原理 离子色谱仪相关文章:离子色谱仪原理





评论