一种大功率LED驱动电路设计与实现

20世纪90年代以来,随着氮化镓基第三代半导体的兴起,蓝色和白色发光二极管的研制成功,具有高效、节能、环保、寿命长等优点的固体光源L ED发光二极管,真正点燃了绿色照明的光辉,被认为是21世纪最有价值的新光源。但是,大功率L ED的电学离散性大,容易受温度的影响,发光二极管导通后,加在L ED两端的电压稍有提高,就会引起流过L ED的电流急剧上升,严重时会使L ED长期超过额定电流工作,容易使L ED的半导体芯片烧坏。要控制大功率L ED的亮度,驱动器必须提供恒定的电流。大功率L ED恒流驱动常用的有电阻限流、开管变换器、专用芯片等。电阻限流方式控制方法简单,但是这种方法不能解决由于供电电压波动引起的光通量输出变化问题,而且能量损耗大,效率低,不能实现节能的目的。不少半导体厂家推出了大功率L ED专用驱动芯片,取得了不错的效果,但是这种芯片价格普遍比较贵。针对现有驱动电路的缺点,该文提出了一种基于UC3843的峰值电流控制的大功率L ED恒流驱动电路,该电路简单易用,控制方法简单,效率高,成本低;并对UC3843的外围电路进行优化设计,实现了PWM调光控制,避免了模拟调光带来的色坐标偏移问题。其试验结果验证了该驱动电路的可行性。
1 驱动电路构成及设计
大功率L ED是电流型器件,L ED 的亮度随工作电流的增大而增大,为保证流过每只L ED的电流相同,使每只L ED的亮度均匀,采用L ED串联。整个电路的结构框图如图1所示。电流检测为PWM控制电路提供反馈,与PWM控制芯片内的误差放大器的输出信号进行比较,实现对输出脉冲占空比的控制,从而稳定流过L ED的电流。PWMD是数字调光脉冲信号输入,通过调节其占空比可以调节L ED的亮度,达到调光的目的。
采用的IC芯片UC3843是高性能固定频率电流模式控制器,芯片有8个引脚,外电路接线简单,所用元件少,且性能优越,成本低,芯片内部具有可微调的振荡器(能进行精确的占空比控制) 、温度补偿的参考、高增益误差放大器、电流取样比较器。电压调整率好,频率响应好,稳定幅度大;具有低启动电流,带滞后的欠压锁定,工作频率可达500kHz ,大电流的图腾柱式输出,非常适合驱动MOS场效应管。
其内部结构方框图如图2所示。
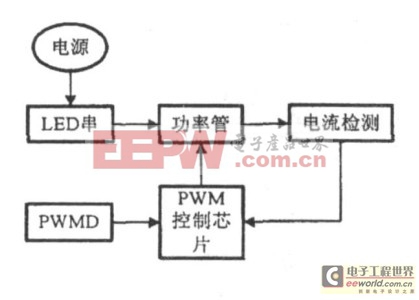
图1 驱动电路结构框图
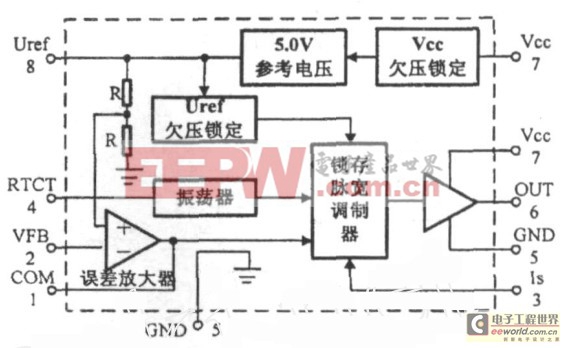
图2 UC3843内部结构简化结构框图
1. 1 驱动主电路设计
该电路主要由UC3843 ,MOSFET Q1 ,电感L1和大功率L ED串续流二极管D1及检测电阻R12组成的BUCK型峰值电流控制模式电路,如图3所示。利用引脚4所接的电阻电容R13和C9确定PWM的锯齿波振荡频率;由R1 ,R2 ,电位器R3TL431 ,R4 ,R5 ,C3和UC3843内部的误差放大器组成电流检测反馈的电压基准与电流检测信号通过电流检测比较器比较来控制PWM信号的占空比,限制流过L ED的电流峰值。由此可得流过L ED的电流峰值为:
Ipcak≈Is =(Vpin1- 1. 4V)/3R12(1)
式中,Vpin1为UC3843芯片1脚电压, Ipcak为流过L ED的电流峰值, Is 为检测电流峰值。
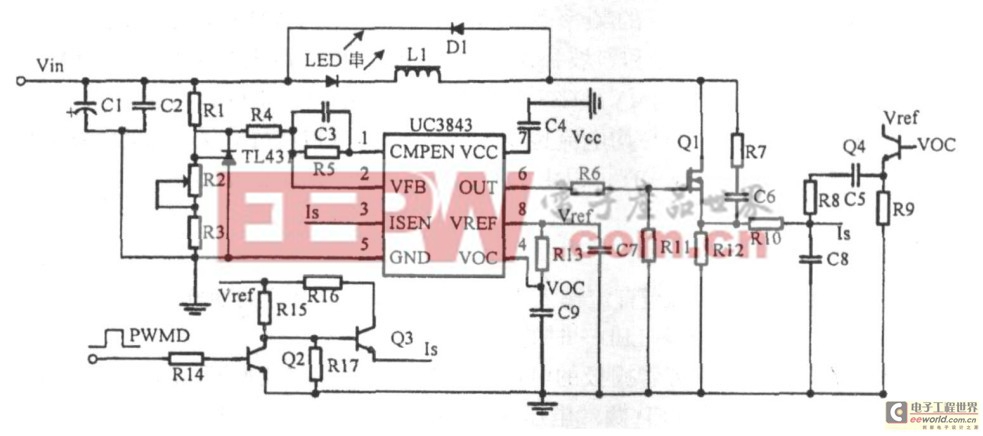
图3 驱动电路原理图
1. 2 斜坡补偿电路设计
CCM下电感L1中的电流iL波形如图4所示,可得:
α=△IL/△I0=D/(1 - D)=m2/m1(2)
式中,Ue 为误差放大器输出电压,m1、- m2为电路中iL的上升和下降斜率, △I0 为某个周期扰动使iL初值产生的增量, △IL为该周期结束时iL的变化量。
可见,要使系统稳定,应有△IL △I0,所以有D 0. 5 ;当D > 0. 5时,电路会出现次谐波振荡,使电路不稳定。消除谐波振荡的技术是增加斜坡补偿,即给Ic 增加一个负斜率的斜坡。增加斜坡补偿后,新控制量斜率为- ma。增新的m′1= m1+ ma,新的m′2 = m2- ma,电感电流的波形如图5所示,式2变为:
α=(m2- ma)/(m1+ ma)(3)
通过设计合理的ma,可以使|α| 1 ,即系统达到稳定。一般取ma = 0. 75m2。
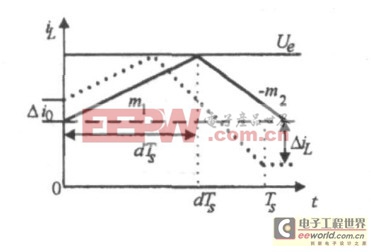
图4 CCM模式下波形
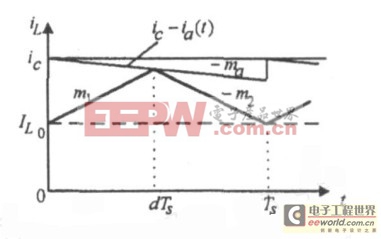
图5 斜坡补偿后波形
设计的斜坡补偿电路采用CT上的峰峰值电压信号作为斜坡补偿的输入信号,图3中斜坡补偿网络原理电路由晶体管Q4,R8 ,R9 ,R10 ,R12 ,C5 ,C8组成,C5 为交流耦合电容,隔离脚4输出振荡信号中的直流分量。为减小定时电阻R13和补偿网络之间相互影响,在振荡器输出和补偿网络输入之间增加了一级射极跟随器。R8和R10组成分压网络,在UC3843的脚3获得斜坡补偿信号,同时R10和C8组成尖峰电流吸收器,滤除尖峰干扰信号。斜坡补偿信号和电流检测信号在UC3843的脚3处求和,实现了斜坡补偿。
1. 3 调光电路设计
在UC3843内部,电流检测比较器的反向输入端被内置的齐纳二极管钳位在1V ,只要芯片脚3上的电压达到1V ,端6关闭,立即使MOS管Q1关断。因此可以通过控制脚3的输入电压值改变一个周期内流过L ED的平均电流来对L ED进行调光控制。图3中由R14 ,R15 ,R16 ,R17 ,Q2和Q3组成。为使人眼感觉不到灯光的闪烁,取PWMD信号的频率为100~200HZ。当PWMD信号为高电平时, Q3 截止,UC3843的3脚的信号为电流检测信号和斜坡补偿信号之和,此时电路正常工作;当PWMD信号为低电平时,Q3 导通,加在3脚处的电压超过1V ,UC3843的输出端6立即使MOS管截止。当PWMD信号的占空比变化时,一个周期内流过L ED的平均电流也发生变化,从而L ED输出的光通量也发生变化,达到控制L ED亮度的目的。实际应用中PWMD可以由具有PWM功能的简单的单片机产生。
2 试验结果
对设计出的驱动电路进行测试,当直流输入为9. 5V ,输出峰值电流为300mA ,定时电阻R13为10k ,定时电容为1nF ,驱动一只1W大功率L ED时的试验结果如下:当PWMD引脚接高电平时,开关管栅极的电压信号波形Vg(下方波形)和R12的电流检测信号的波形Vs(CH1 ,上方波形)如图6所示,L ED 两端电压Ve波形如图7所示。实验结果基本符合理论值。
当PWMD引脚接一频率为100Hz ,占空比为50 %的脉宽信号时,观察到L ED的亮度明显降低,开关管栅极的电压信号波形(CH1 ,上方波形)和流过限流电阻R12的电流检测信号的波形(CH2 ,下方波形)如图8所示。基本符合理论分析的结果,但是调光电路的瞬态响应还不是很理想。
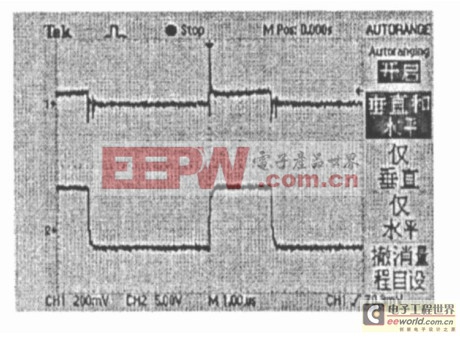
图6 栅极电压Vg和电流检测信号Vs波形
图7 L ED两端的电压Ve波形

图8 栅极电压和电流检测信号波形
3 结 论
采用UC3843设计的大功率L ED驱动电路可以克服因电压不稳所引起的发光强度的变化,整个电路结构简单,响应快速,稳流性能好。通过PWM实现了调光控制,基本达到了设计要求。电路还存在不足,调光部分瞬态响应不是很理想,还有待进一步改进,下一步将着重做这方面研究。本电路可应用于太阳能照明系统中,也适用于AC/ DC的照明系统中。









评论