基于can总线技术的电子控制系统单元在汽车网络系统中的应用

本文采用了基于can总线技术,设计开发了应用于汽车网络系统中的电子控制系统单元。
1 电子控制系统单元can通信模块的设计
根据can通信原理,电子控制系统单元can通信模块硬件主要由can控制器、can驱动器及中心微处理器构成。传统的can通信模块采用51系列的单片机作为中心处理器,sja1000作为can控制器,pca82c250作为can驱动器。这种方案所占空间大,外围接口扩展局限,同时功耗高。本设计中,我们采用内嵌有can控制器的lpc2119和tja1050总线驱动器构成电子控制系统单元的can通信模块。can通信模块硬件图如图1所示。
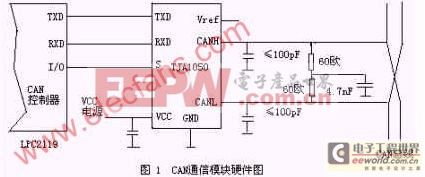
lpc2119内带有arm7内核,具有封装小、功耗低、多个32位定时器、4路10位adc、2路can以及多达9个外部中断等优点。tja1050是philips公司生产的,用以替代pca82c250的高速can总线驱动器。该器件提供了can控制器与物理总线之间的接口以及对can总线的差动发送和接收功能。对于由"弱"终端构成的端节点,tja1050外围的电阻和电容能改善系统的emc性能。实践证明,采用lpc2119和tja1050构造can通信模块,外围扩展能力强,空间小,同时改进电磁辐射(eme)性能和抗电磁干扰(emi)性能。
2 电子控制系统单元控制模块的设计
传统的"蜘蛛网式"控制模块,电路复杂,维修难度高。本设计中,我们采用功率模块、人机通信模块、状态量输入模块的结合,构造出电子控制系统单元控制模块,提高了整个系统的可观性和实效性。控制模块硬件图如图2所示。
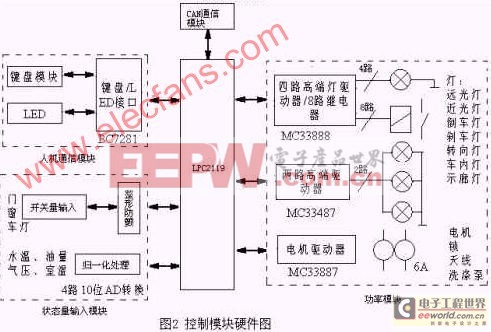
2.1 功率模块
考虑到汽车功率负载大及lpc2119的i/o口驱动的局限,系统中采用功率模块作为中心微处理器与功率负载之间的桥梁。
设计中,我们采用摩托罗拉公司生产的mc33888功率器件控制远光灯、近光灯、倒车灯、刹车灯。mc33888内部集成有四路高端灯驱动器和8路继电器或发光二极管驱动器,是一个可控制网络,具有在板诊断、与微控制器通信报错能力及故障软化等优点。考虑到车内灯和示廊灯的功率相对比较大,我们采用mc33487功率器件进行控制。mc33487内部集成两路带有电流感应的20毫欧姆高端驱动器,电流输出4.5a.感性负载以及大电流的短路保护是整个设计的难点。mc33887具有功耗低、等待模式下电流25微安、输出电流超过8安的短路关断等优点,所以系统采用mc33887功率器件对电机、锁、天线、洗涤泵进行控制。
2.2 人机通信模块
为了提高驾驶员和乘客的舒适性、安全性,整个系统必须在人和机器之间建立良好的人机通信模块。bc7281、键盘模块及外围的led之间的结合,构造出人机通信模块。bc7281是比高公司推出的16位数码管显示及键盘接口专用芯片。该芯片通过外接移位寄存器(74hc164、74ls595等)可控制16位数码管或者128只独立的led。bc7281的驱动输出极性及输出时序均可通过软件进行控制,从而和各种驱动电路配合,适合任何尺寸的数码管。通过人机通信模块,人的意识能够为机器所识别,同时机器也可以将一些相应的状态信息反馈到led或者lcd上,达到人机通信的可视化效果。

评论