利用高亮度LED和SEPIC电源模块构建显示器背光方案

概述
汽车工业面临一个发展趋势,即在汽车显示屏(导航和信息娱乐终端系统)中越来越多地使用高亮度LED (HB LED)替代冷阴极荧光灯(CCFL)进行背光。与CCFL相比,HB LED工作在更低的直流电压(低EMI)、具有更长的使用寿命、在极端温度和振动环境下性能更佳,并且不含汞,无操作延时。除此之外,CCFL的调光范围是300:1 (最高值),而HB LED的调光范围可以达到4000:1甚至更高。
考虑到光照环境,较宽的调光范围对于车体内部的显示器背光非常重要。当太阳光直接照射时,应具有足够高的背光强度,以解决强光反射的影响;夜晚则需调低背光强度,以免对驾驶员产生视觉影响。由于HB LED背光方案中通常采用多串LED排列成的矩阵架构,每串HB LED采用相同的驱动电流,因此具有一致的亮度和光谱。为了保证串与串之间的一致性,需要精确的电流驱动设计方案。
传统的HB LED驱动器设计挑战
提高调光范围看似简单,但是,如果在满足系统效率要求的前提下解决这个问题,将会面临诸多设计挑战。脉宽调制(PWM)线性HB LED驱动器工作在250Hz或更高频率时可以解决上述问题。但线性驱动器会消耗大量功率,散热将成为又一难题。为解决低效问题,需要采用开关模式HB LED驱动器,而电磁能量转换及控制电路占用较长的响应时间,很难满足4000:1的PWM调光要求(250Hz频率、0.025%占空比对应于1µs)。
比较合理的解决方案是将自适应开关调节器与线性驱动器相结合,自适应开关调节器并不提供固定电压,而是将输出电压调节在非常靠近HB LED最高串联电压的位置,开关调节器通过对驱动器漏极电压进行“二极管或”,选择最低点连接到调节环路,满足设计要求。线性驱动器保证为每串HB LED提供快速PWM调节。
这种混合架构可有效降低功耗、提供快速响应。但在HB LED关闭(PWM = 低电平)时存在一个潜在问题,电源自适应反馈环路的检测电压消失,控制环路会导致此关闭模式下HB LED的供电电压失效,无法满足极低占空比要求。为解决这一问题,开关调节器必须设置一个“静止”模式,以保持足够高的电压,保证在短暂的占空比“导通”期间正常工作,为调节器留出较长的恢复时间。
SEPIC的设计优势
对于不同应用,每串HB LED的个数可能不同,HB LED正向导通电压的容限通常为±15%。另外,在汽车应用中,输入电压具有相当宽的变化范围。考虑到这些不确定性,最好选择单端初级电感转换器(SEPIC)拓扑,SEPIC结构允许输入电压高于或低于输出电压,具有极高的设计灵活性。缺陷是SEPIC设计需要两个电感(或耦合线圈)和一个串联电容。但与反激方案相比,SEPIC设计中的串联电容可以吸收漏电感中的能量,降低对MOSFET开关的要求。
在图1、图2所示电路中,MAX16807是SEPIC方案中的核心控制器,能够为两串HB LED (每串5只LED)提供150mA的驱动电流。IC采用峰值电流控制模式,开关频率可变。另外,MAX16807具有8路可编程吸电流控制电路,每路可提供50mA电流,36V驱动器可精确建立每串LED所要求的驱动电流。为了获得更高电流,还可以将输出连接在一起。通过/OE引脚能够以极短的占空比控制HB LED驱动器的通/断,提供较宽的调光范围。MAX16807 SEPIC电源控制器件组合了多项功能,电路首先建立公共电压,然后由线性驱动器调节每串LED的电流。
图1. SEPIC设计范例,可驱动2串HB LED,每串包含5只LED、驱动电流为150mA。
查看详细电路(PDF,90.7kB)
图2. 采用MAX16807 SEPIC LED驱动器的图1电路原理图(VIN = 8V至18V,VLED = 22V [自适应],ILED = 150mA/串)。
SEPIC设计分析
SEPIC设计中具有原边电感(L1)、副边电感(L2)和位于两个电感之间的串联电容(C3),某种程度上,可以把SEPIC设计看作是具有隔直流电容(消除输入电压)的boost调节器,允许输出电压高于或低于输入电压。然而,为了复位隔直流电容,允许能量传递到输出端,在副边放置了另一个电感(L2)。
对电路进行分析,会发现C3上的直流电压等于输入电压。当MOSFET Q1导通时,VIN为L1充电,C3为L2充电。由于C3上的电压等于输入电压,导通期间每个电感将作用相同的充电电压。关闭期间,每个电感的放电电压相同,为输出电压加上D1的导通电压。由于L1和L2具有相同的充、放电电压,它们可以具有相同的电感量和纹波电流,但二者的平均电流相差较大。
Q1导通时,D1反偏,只有输出电容C12支持输出电流(ILED);Q1断开时,L1的电感电流流过C3,与L2电流合并,为输出电容充电并支持ILED。通过对方程式进行分析,会发现电路中L2的电流用于支持ILED,L1的电流重新为输出电容充电,补充能量。即L2的平均电流等于ILED,而L1的平均电流等于ILED × VOUT/VIN。
选择SEPIC元件时,可以使用SEPIC设计电子表格,该表格可从Maxim网站下载。
选择工作频率
开关频率的选择需要权衡最小电感、电容尺寸,并在较高开关频率时不会对Q1造成不合理的热应力要求。MAX16807数据资料给出了一个公式,利用定时电阻(R6)和定时电容(C7)确定开关频率。选择3kΩ电阻和1000pF电容,电源转换器将工作在500kHz标称频率,能够在尺寸和效率之间达到较好的均衡。
电流检测
MAX16807采用峰值电流控制模式,峰值电流模式中将开关电流的峰值与输出电压误差相比较,产生相应的脉冲占空比,控制输出电压。电流检测电路还提供过流保护。为了防止毛刺注入电路,采用由R7 (1kΩ)和C10 (100pF)构成的100ns滤波器,该滤波器足以消除电压毛刺,而且不会对电流波形有太大影响。
斜率补偿
对于电流模式控制器,当占空比高于50%时,会造成谐波不稳定。这是由于电流的上升(导通)斜率低于下降(关断)斜率,不稳定性表现为调节器为了获得正确的占空比,会在大/小占空比之间交替变化。不稳定性会导致电流、电压纹波增大,为了避免这一问题的出现,可以人为增大电流监测信号的斜率。
晶体管Q2的基极连接在RTCT引脚,该引脚的纹波电压通过驱动Q2进入D2和R8,在R7产生一个小电流,为电流检测信号提供一个斜率补偿。图3所示为斜率补偿信号、电流检测信号和二者求和的滤波信号。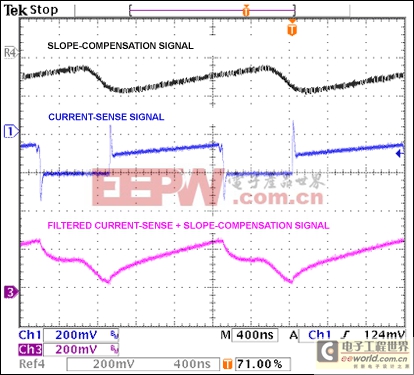
图3. 斜率补偿、电流检测以及二者求和后的滤波波形
分离电感与耦合线圈
SEPIC设计中需要确定使用两个分离电感还是一个耦合线圈,通常,使用一个耦合线圈要比使用两个电感价格便宜。另外,使用耦合线圈可以减小电流(是电感L1、L2的主要决定因素),从而减小电感量。
当然,与分离电感相比,耦合线圈的选择范围较窄。如果在多种应用中采用同一设计,最好选择分离电感,因为L1的平均电流在很大程度上取决于VIN和VLED,考虑到设计灵活性,可以选择分离电感。
线性HB LED电流驱动器
MAX16807具有8路线性HB LED电流驱动器:OUT0至OUT7。电阻R5用于设置每个驱动器的电流,每路驱动器的最大电流可达50mA。并联驱动器输出可以获得更大的HB LED驱动电流。该设计中将每路驱动器电流设置在37.5mA,四路驱动器并联后可以为每串HB LED提供150mA的电流。
可通过两种途径控制驱动器:一种是由/OE引脚控制驱动器的通、断,实现PWM亮度调节,这种方式为首选方案;另一种方式是通过SPI™接口分别控制每路驱动器的通、断。另一款类似IC (MAX16808)还可以通过SPI接口获悉驱动器是否发生故障。在图2所示结构中,施密特触发反相器(U2),通过CLK引脚将一串连续的“1”送入IC,开启输出。必要时,也可以通过J2连接SPI接口。
自适应反馈控制
利用同一电源,通过独立的线性驱动器分别驱动多串HB LED时,对于不同的SEPIC输出电压和不同的LED串导通电压,OUTx引脚的电压不同。由于IC内部HB LED驱动器的功耗是VOUTx之和乘以HB LED电流,由此可见,保持尽可能低的SEPIC电压(VLED)非常重要,同时还要保证足够高的导通电压,使OUTx引脚的电压略高于饱和电压(大约为1V)。自适应反馈电压通过或逻辑二极管选择较低的OUT电压作为稳压调节,电阻(R2)的压降使OUTx的电压保持在至少1V,从而满足上述设计要求。
设计中,U3的阳极电压等于两个OUT电压(OUT0至OUT3和OUT4至OUT7)中较低的一个,电流从VLED通过R1、R2、U3进入较低电压的OUT端。由于R1-R2节点电压与反馈电压(2.5V)相等,HB LED驱动器的电压为:
通过修正R2的数值,可以将VOUT电压稳定在最小值。另一串LED将具有较低的串联电压和较高的OUT电压。线性驱动器吸收对应的压差和功耗,由于这个原因,最好选择具有一致的正向导通电压的HB LED,正向导通电压的绝对值并不严格,但它们之间的差异应控制在200mV以内,具体取决于每串HB LED的个数。
另一个SEPIC设计电子表格有助于选择自适应控制元件。
PWM亮度调节
对于PWM亮度调节,MAX16807的/OE引脚输入为PWM反相信号,用于控制驱动器的通、断。通、断脉冲宽度即使低于1µs,也能保证正常工作。但是,当OUTx驱动器关闭时,自适应电压控制器检测的节点电压浮置在一个较高的电压,调节器在试图满足误差放大器输出要求的时候降低了VLED。因此,当PWM输入返回到高电平时,VLED的电压可能不足以驱动HB LED串,经过数十微秒后,SEPIC调节器补充所需电压,但对短脉冲(低占空比)应用意义不大。
图2所示的设计利用PWM信号,通过R12和D3拉低节点电压,从而解决了上述问题。电源在电压高于任何预期的工作电压时进入“静止”模式。对于短脉冲,额外的电压增大了瞬时功率,但极低的占空比可以忽略这一损耗。占空比大于3%时,VLED进入自适应电压控制。图4中,输出电压从大约21.1V的“静止”电压(PWM处于“关闭”状态)变化到大约15.8V的自适应电压(PWM处于“导通”状态)。从图5可以看出,占空比为3%时,VLED在返回到静止电压之前刚好达到自适应电压。图6中,“导通”脉冲的宽度只有1µs,VLED不会从静止电压发生变化。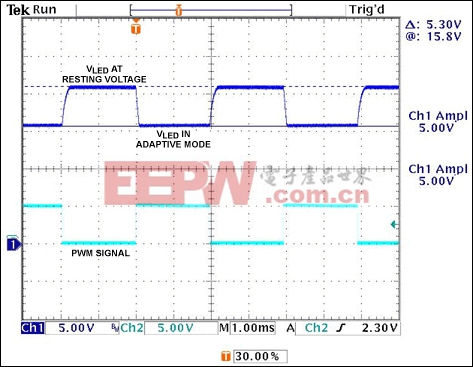
图4. 50% PWM信号下的VLED响应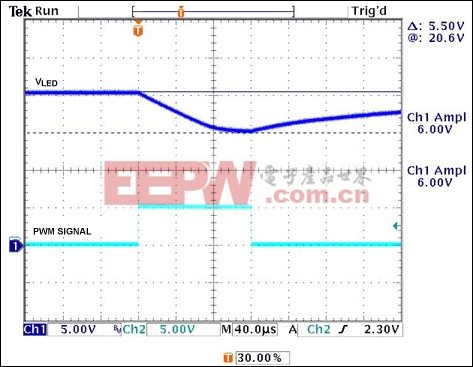
图5. 3% PWM信号下的VLED响应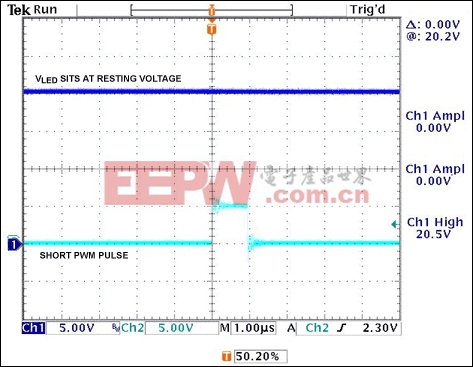
图6. 1µs PWM信号下的VLED响应
补偿
SEPIC的补偿非常简单,电流模式控制将功率环路简化到单极点,该极点由输出电容和负载电阻决定。系统稳定性要求使用“II型”补偿网路,因为负载基本保持不变,控制环路的响应速度可以很慢,需要注意的是双控制环路(自适应和静止)和较大的输入阻抗差异(R1 = 210kΩ,R2 = 10kΩ)。R14相对于R1和R2的较大阻值减缓了阻抗变化的影响,R14和C5 (0.1µF)组合在很低的频率处构成主极点。
当负载电流从满负荷变化到零时,输出电压可能出现过冲,出现这一情况有两种原因:1) 电感储能释放到输出电容;2) 低速响应控制环路。如果电感储能是造成过冲的主要因素,可以增大输出电容,以限制过冲。如果控制环路响应速度过慢是主要因素,可以使用过压箝位二极管(图中D7)限制过冲,图7给出了带有/不带D7时的过冲波形。 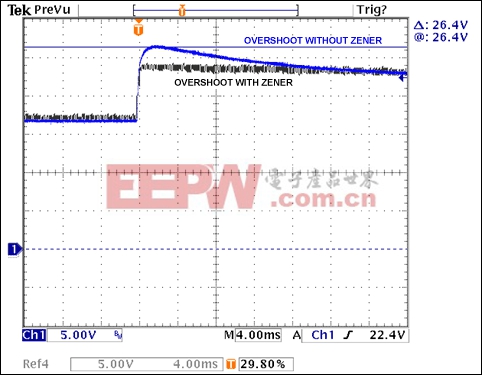
图7. 带有/不带过压箝位齐纳管时的VLED过冲
结论
HB LED阵列需要较宽的调光范围,将自适应开关调节器与线性驱动器相组合可以得到一个极具成效的方案,既可满足瞬态响应特性,也可以满足较大占空比时对电源效率的要求。这种应用中通常选择SEPIC调节器,因为它允许输入电压高于或低于输出电压。利用MAX16807可以方便地构建SEPIC控制器和8路可并联的线性驱动器,满足设计的基本需求。












评论