多传感器融合定位在高速铁路的应用2

(1)由局部滤波器l处理GPS接收机输出的列车位置信息,并给出状态估计x1和估计误差的协方差矩阵p1;
(2)局部滤波器2处理陀螺仪和里程仪输出的角度信息x2和列车运行距离信息,给出状态估计和估计误差的协方差矩阵p2;
(3)局部滤波器3处理查询应答器输出的进路长度等信息,给出状态估计x3和估计误差的协方差矩阵p3;
(4)x1,x2,x3,及p1,p2,p3被送到主滤波器,并同主滤波器的状态估计一起按式(1)和式(2)进行融合,得到全局最优估计和协方差矩阵

(5)利用主滤波器的最优估计值对3个子滤波器的状态估计进行重置。即

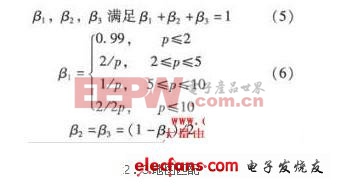
2.2.3 信息分配参数的选择
不同的信息分配系数可以获得联邦滤波器的不同结构以及不同的容错性能、滤波精度和计算量。本方案中设计了一种自适应联邦卡尔曼滤波器。利用GPS接收机输出的反映定位精度的参数为依据,自动调整P值的大小。本定位系统根据GPS接收机的p值大小来决定取值。具体的自适应算法为
2.3 地图匹配
GPS和DR系统的组合导航在一定程度上提高了定位系统的精度和可靠性,但定位数据仍然存在一定误差,并且当GPS数据丢失时,DR系统的误差会累积变大。在实际系统中通常采用地图匹配算法来进一步提高GPS和DR系统的精度。
地图匹配的基本思想是将车辆定位轨迹与数字地图中的道路网信息联系起来,并由此相对于地图确定车辆的位置。地图匹配的算法分为两个相对独立的过程:一是道路选择,主要是对道路进行分段,提取道路特征信息,然后采用适当的搜索规则和匹配算法根据当前传感器给出的车辆信息,在地图数据库中寻找一条最有可能的道路;二是道路匹配,将车辆当前位置匹配并显示在这条道路上,用于消除传感器的定位误差。


评论