基于MSP430F149的变频伺服系统的设计

1变频伺服系统的功能
为达到变频伺服系统的运行可靠、良好的静态以及动态的性能要求,其功能如下:
1)精确的伺服控制功能
高精度、高速度、大功率是伺服系统的发展趋势,系统采用高速单片机作为核心控制器,对变频器进行控制,使伺服系统的控制达到更高的精度。
2)通信功能
单片机与上位机之间必须确保通信的正常与正确,单片机将接收到来自上位机的控制命令与采样到的反馈信号相比较得到偏移控制量,只有得到相应的偏移量,单片机才对变频器输出相应控制信号。
3)反馈量精确采集功能
反馈量采集的精确度直接关系到控制精度,系统采用变M/T方法对伺服电机进行转速采样,采样精度较M法、T法更加精确,从而确保了更加精确的控制。
2系统硬件设计
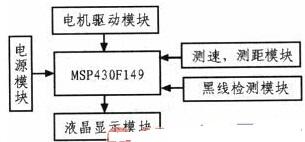
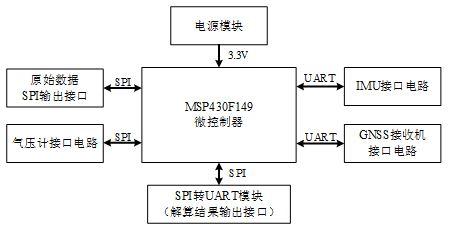
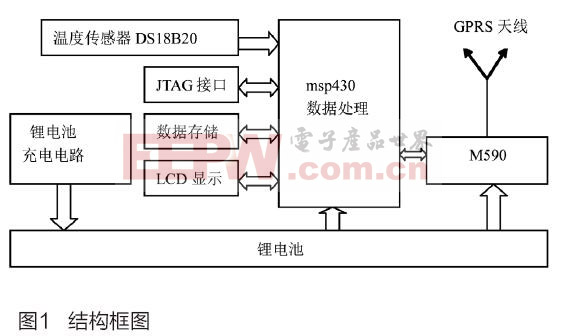
系统以单片机MSP430F149为核心控制器[2],集成变频器、变频电机、采样编码器以及PC上位机组成。其系统原理框图如图1所示。

图1系统框图
其控制过程为:单片机MSP430F149控制协调系统各功能模块工作;PC上位机通过串口UART0将控制信号传输给MSP430F149,单片机通过对反馈信号采样后进行处理,将处理后的数据与来自上位机的控制信号相互比较,得到误差量,再将误差量经过相应的运算得到伺服系统控制量;MSP430F149将得到控制量通过串口UART1直接转换成RS485信号输出至变频器,变频器根据接收到的控制信号产生变频变压的电源信号以驱动电机完成期望动作;同时上位机通过MSP430F149的串口UART0获取变频电机的速度、系统参数等形成打印报表,为操作人员良好人机操作界面。
2.1单片机单元
MSP430F149是变频交流伺服系统的核心控制器,完成系统控制信号与测量信号的传递及复杂的控制决策,协调各模块进行工作,操作控制指令的接收与识别。此单片机是一种超低功耗微控器,采用16位的体系结构,16位的CPU集成寄存器和常数发生器,实现了最大化的代码效率。包括2个内置16位的定时器、一个快速12位A/D转换器,两个通用串行同步异步通讯接口和48个I/O端口,片内包含60KFLASHROM和2KBRAM。本设计是实时控制系统,需对数据进行实时采集和传输。MSP430F149中60KFLASH存储器可满足系统程序对烧录存储空间的需要,内部数据RAM(2K)保证了数据实时采集、处理和传输,48个数字外设端口方便地实现了与外围器件的数据传输与控制,16位的体系结构保证了系统能够完成复杂的控制决策,而双串口UART则满足了控制器与上位机及变频器的实时通信需要。
2.2光电编码器及变M/T测速MSP430F149内部实现
伺服系统的精度控制主要取决于电机转速信号的测量精度,本系统采用增量式光电编码器作为电机转速为检测元件。比较常见的电编码器测速方法有M法、T法和M/T法。M法是在规定时间间隔内,测量光电编码器输出的脉冲数量来获得被测电机转速的速度值,适合高速测量场合。T法测量是测量相邻两个脉冲间隔时间来确定被测电机的转速速度的方法,此方法在高速场合测量时精确度性较差,因此一般只适用于低速测量的场合。M/T法是通过同时测量检测时间和在此检测时间内所发生的脉冲数来确定转速。在整个速度范围内有着较好的测速精度,但在低速时随着频率的降低,需要较长的测量时间,无法满足伺服系统的快速动态响应性能指标[2]。近年来变M/T测速方法逐渐被使用,是指在测速过程中,不仅检测光电编码器脉冲M1和高频时钟脉冲M2随电机转速不同而变化,而且检测时间Tg也在变化,它始终等于光电编码器M1个脉冲周期之和(测速原理如图2所示)。Tg的大小由高频时钟脉冲M2计取,则电机速度计可由以下公式确定[3]。

式中:M1为预置脉冲数;M2为高频时钟脉冲数;fc为高频时钟频率;λ为光电编码器倍频系数;P为光电编码器线数。
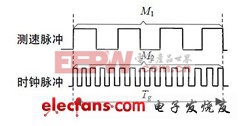
图2变M/T法测速原理
在电机低速运行时变M/T法的检测时间Tg明显比M/T法检测时间要短,由此可见用变M/T法转速测量能够满足控制系统对转速测量的精度及实时性的要求。
利用MSP430F149内部定时器A和B可以完成对电机转速的变M/T法的测量,可以简化外围电路的设计,减小了系统功耗。定时器A对外部光电编码器脉冲进行计数,定时器B对系统内部高频时钟进行计数;定时器A工作于16位计数方式,将测量值M1装入定时器A的寄存器内,在定时器A计数达到M1个脉冲时,定时器产生中断,程序读取定时器B的计数值M2,由于M1已知依据式(1)可快速而准确计算出电机转速。
2.3变频器
变频器是整个伺服系统的主要执行元件。其工作原理是:在主电路中采用交直交变换方式将220V、50Hz的交流电通过整流器变成平滑直流,然后通过半导体IGBT组成的三相逆变器,将直流电变成可变电压、可变频率的交流电。其变频控制方式主要有V/F控制、空间矢量控制(VC)及直接转矩控制(DTC)方式。V/F变频控制方式在低速时因定子电阻和逆变器死区效应以及变频器低压导致的转矩受定子电阻压降影响较大等原因而使系统性能下降、稳定性变差,从而只适用于转速变化范围小机械特性要求不高的场合。空间矢量控制(VC)方式由于在实际应用中转子磁链难以准确观测,系统特性受电动机参数的影响较大导致实际的控制效果难以达到理想水平。而直接转矩控制(DTC)则摒弃了矢量控制中复杂的解耦运算,直接在定子坐标系下分析交流电动机的数学模型来控制电动机的磁链和转矩,简化了主电路、提高了系统的可靠性,从而适用于转速和负载变化范围较大的场合[4-5]。
综上,本伺服系统采用台达VFD-V型高频变频器。其内含PID反馈控制及V/F、向量控制和转矩控制等多种控制方式(系统采用转矩控制方式),并且零速转矩可达150%以上,保证了系统具有良好的静态性能。
3系统软件设计
为方便系统维护与升级,系统软件设计采用模块化程序结构,主要有主程序、电机伺服中断服务程序、测速服务子程序等组成。
3.1主程序
主程序在完成系统初始化后,进入上位机通信查询及显示子程序循环,等待中断的发生,电机速度采集采用定时中断方式来实现。主程序流程图如图3a所示。
3.2电动机伺服中断程序
变频电机伺服中断程序由MSP430F149内部定时器A完成中断并且执行,电机控制中断程序流程图如图3b所示。
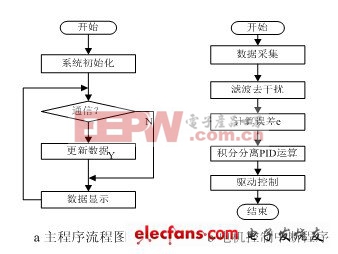
图3程序流程图
3.3数字PID调节器设计
在数字PID调节控制系统中,加入积分校正后,系统会产生过大超调,这是伺服系统所不允许的[6-7]。为减少超调对控制系统动态性能的影响,需要在电机伺服过程中的启动、停车或大幅度偏离给定时采用积分分离PID控制算法,只加比例、微分运算取消积分校正。而当被控制量接近给定值时,才使用积分校正以消除静态误差。为减少超调量,提高系统的稳态控制精度,使系统拥有较高的控制品质本伺服系统引进积分分离PID控制算法。具体算法实现如下:
(1)根据实际情况,设定阀值ε》0。
(2)当![]() 时,采PD控制,避免
时,采PD控制,避免

pid控制相关文章:pid控制原理
伺服电机相关文章:伺服电机工作原理
pid控制器相关文章:pid控制器原理
矢量控制相关文章:矢量控制原理 三相异步电动机相关文章:三相异步电动机原理
评论