简化BLDC马达设计的FOC控制技术

FOC 方法可以让马达在全转速范围内顺利运转,在零速时产生最大转矩,并能够快速加速和减速。事实上,由于马达的尺寸小、成本和功耗低,无传感器 FOC 的诸多优势使其在对性能要求较低的应用中成为广受欢迎的选择。
特定应用解决方案
即便如此,实现无传感器 FOC 需要复杂的数学算法,这对于普通设计人员来说可能并不熟悉。在过去,设计师们通常依赖于复杂的数字讯号处理 (DSP) 芯片来实现无传感器 FOC。以快捷半导体的 FCM8531 为例,它为工程师们提供了专门的解决方案,使得开发无传感器 FOC 应用变得更为容易。
针对采用无传感器磁场导向控制 (FOC) 的系统,快捷半导体提供了一种配置有并行核心处理器的特定应用控制装置 FCM8531。 如图 1 所示,FCM8531 由一个先进马达控制器 (AMC) 处理器和一个 8 位兼容 80C51 的 MCU 处理器组成。
图二 : FOC马达控制 IC功能方块图(以FCM8531为例)
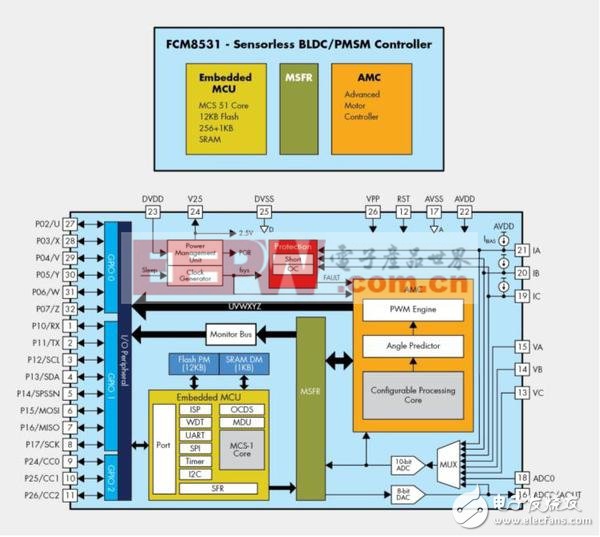
AMC 是一个专为马达控制而设计的核心处理器。它整合了一个可配置的处理核心处理器和外围电路,执行无传感器 FOC 马达控制。系统控制、用户接口、通信接口和输入/输出接口均可通过嵌入式 80C51 MCU来针对不同的马达应用进行程序设计。
FCM8531 的并行核心处理器的优势是,两个处理器可以独立工作,相互补充。 AMC 处理专门用于马达控制的任务,如马达控制算法、PWM 控制、电流检测、实时过电流保护和马达角度运算。 嵌入式 MCU 通过通讯接口向 AMC 提供马达控制命令,来执行马达控制活动。 复杂的马达控制算法在 AMC 中执行,因此,这种方法可减少软件负担,并简化控制系统程序。
我们为用户提供可用于开发软件、编译程序及进行实时调试的马达控制开发系统 (MCDS) IDE 和 MCDS 编程工具。设计人员可从函式库中选择适合的函式,快速编译程控功能和通讯协议,从而实现以前只能在高层次 DSP 上实现的效果。
结论
从能耗角度来看,消费类电子产品和工业设备从传统的 AC 马达过渡到体积更小、更为高效的 BLDC 马达具有重大意义,但设计 BLDC 控制算法的复杂性阻止了工程师们实现这种过渡的积极性。为 BLDC 马达控制而专门设计的专用 IC,如快捷半导体的 FCM8531,使开发人员更易于采用 BLDC 马达,有助于加快向更高效模式的过渡与转换。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理






评论