控制系统的稳定性标准

《线性及开关电源的控制环路设计》是Power Electronics前专栏作者Christophe Basso的最新著作。此著作注重探讨工程师真正需要了解的补偿及稳定给定控制系统的知识。本文包含此书有关稳定性标准章节的摘录内容。
本文引用地址:https://www.eepw.com.cn/article/203172.htm在电子领域,振荡器是一种能够产生自激正弦信号的电路。在多种多样的配置中,振荡器的加速过程牵涉到采用振荡器的电子电路固有的噪声。上电时噪声等级上升,此时开始振荡及自激。此类电路可采用图1所示的构成模块组成。如您所视,此配置看上去非常接近于我们控制系统的配置。
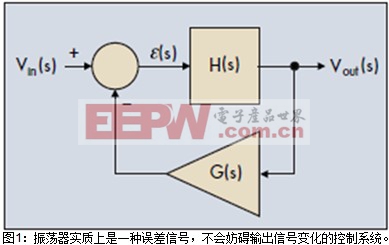
在我们的示例中,励磁输入并非噪声,而是电压电平Vin,它被注入为输入变量以启动振荡器。直接通道由传递函数H(s)构成,而返回通道包含G(s)区块。要分析此系统,我们首先通过输出电压与输入变量的变化关系方程式来写出其传递函数:
如果我们扩充此公式及Vout(s)项,我们就得到
故此类系统的传递函数就是:
在此方程式中,乘积G(s)H(s)称作环路增益,其标记为T(s)。要将我们的系统转换为自激振荡器,则必须存在输出信号,即使输入信号已消失。为了满足这样的目标,就必须符合下列条件:

要在Vin消失条件下验证此方程式,商数(quotient)就必须无限大。商数无限大的条件就是特征方程式D(s)等于0:
要满足此条件,G(s)H(s)必须等于-1。换句话说,环路增益的大小就必须为1,其符号应当改为负号。正弦信号的符号改变只不过是相位翻转180°。这两个条件能以下面两个方程式来进行数学表述:
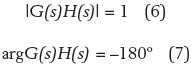
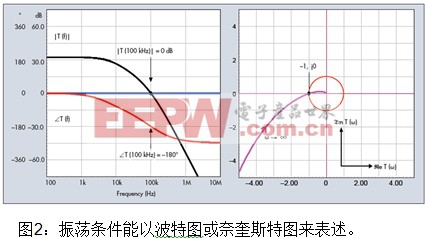
在满足这两个方程式的条件下,我们就得到稳态振荡条件。这就是所谓的巴考森(Barkhausen)标准,由德国物理学家Barkhause在1921年提出。实际上讲,在一个控制环路系统中,它表示修正信号不再抗拒输出,而是相位形式返回,振幅恰好与励磁信号相同。方程式(6)和(7) 在波特图(Bode plot)中表示环路增益曲线,此曲线穿过0 dB轴,且恰好在此点受180°相位滞后影响。在奈奎斯特分析中,环路增益的虚数及实数部份相对频率的变化关系被绘制成图,此点对应于-1, j0。图2显示了满足振荡条件的两个曲线。如果系统略微偏离这些值(如温度漂移、增益变化),输出振荡要么会以指数形式下降至0,要么振幅发散,直到达到较高或较低的电源轨。在振荡器中,设计人员竭力尽可能多地降低增益余量,使振荡条件在多种工作条件下都能满足。








评论