光纤陀螺仪第三闭环回路控制研究
 加入技术交流群
加入技术交流群

扫码加入
和技术大咖面对面交流
海量资料库查询
作者简介:王雅(1995—),女,陕西渭南人,硕士。研究方向:主要从事光纤陀螺仪电路与系统的研究。
本文引用地址:https://www.eepw.com.cn/article/202108/427636.htm0 引言
光纤陀螺仪是当前导航与制导领域广泛使用的惯性器件,具有尺寸小、牢固稳定、启动时间短等特点[1]。为扩大动态测量范围、提高测试性能,信号解调过程中通常构建数字阶梯波反馈相移以及阶梯波复位控制双重闭环回路,保证全温条件下的控制精度。目前光纤陀螺仪普遍采用超辐射发光二极管(Super-luminescent Diode,SLD)作为光源,SLD 性能的不稳定会对光 纤陀螺仪的精度产生极大影响。随着使用时间的增长,SLD 光源输出光功率会逐渐降低;且光源的输出光功率以及光波长易受温度变化影响,复杂的环境因素会对陀螺仪性能造成较大的干扰[2]。
为减小光源不稳定造成的误差影响,对SLD 光源的驱动控制进行研究。光源驱动控制多采用恒流驱动与温度控制相结合的方式来间接稳定光功率,这种方法并不能保证光源工作的稳定性与可靠性[3]。因此,本文提出光源光功率控制技术,在陀螺仪内部增加第三闭环回路反馈,以此提高SLD 光源的控制精度,满足系统要求。
1 系统结构及原理
1.1 光源的作用与选择
光源的主要作用是为光纤陀螺仪提供产生Sagnac效应所需的合适光信号,因此要求使用的光源可靠性高、体积小、寿命长,同时还具备短相干长度、窄的光束发散角及较高的输出功率。SLD 光源是自发辐射的单路光放大器件,发射部分偏振光,光波输出波长稳定、偏振度适宜,这些优点使其成为当前光纤陀螺仪使用的理想光源[4]。
1.2 SLD光源对光纤陀螺仪性能的影响
SLD 光源作为光纤陀螺仪光路结构中唯一的有源功率元件,探测器探测到的光功率取决于光源的输出功率和整个光学系统的总损耗。散粒噪声引起的随机游走与返回探测器的光功率的平方根成反比,为提高光纤陀螺仪的性能,必须提高光源的输出光功率。
干涉型光纤陀螺仪检测器的输出为:

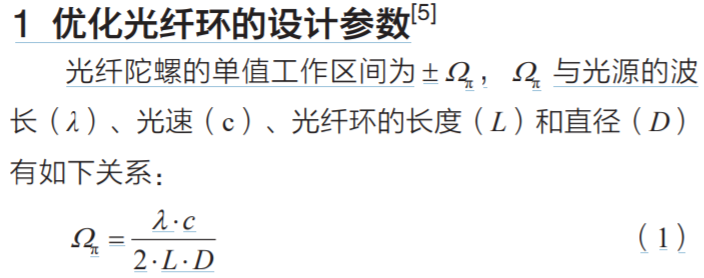
式中:I 为检测光强;K0 为比例系数;I0 为初始光强;φS为Sagnac 相移。目前,对干涉式光纤陀螺仪的研究普遍采用方波偏置方案,对正、负半周期信号相减并化简之后可得出:

式中:L 为光纤总长度;D 为光纤环直径; λ 为光在真空中的波长;c 为光在真空中的速度;Ω 为陀螺转动角速率。由式(2) 可知:光源输出功率I0 的不稳定将影响光纤陀螺仪的测量精度,而平均波长λ 的波动也将导致光纤环的非互易相移产生漂移,即影响光纤陀螺仪标度因数的稳定性。
目前,对SLD 光源的驱动普遍采用恒流源,光源输出光信号的功率由光源驱动电路独立控制,该电路在全温条件下或长时间工作周期内始终保持恒定的驱动电流输出。随着SLD 光源使用时间的增长,SLD 光源在恒定的电流驱动下输出的光功率会逐渐降低;不同温度条件下,注入相同的驱动电流,输出光功率也会发生波动,这些因素将直接影响光纤陀螺仪的整机性能和指标参数。
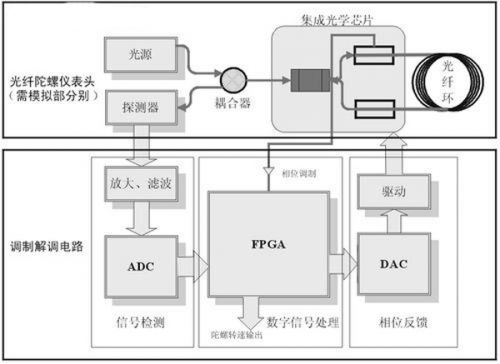
光功率控制技术是以光源输出光功率为对象,实现直接控制。基本思想是通过数字解调电路对PIN-FET 检测到的光信号进行解调,根据光功率的波动变化,提高或降低光源的驱动电流,摒除其他环境因素造成的干扰,实现光纤陀螺仪光路内传输光信号的闭环稳定,系统结构图如图1 所示[5]。

2 系统硬件设计
要实现对光源输出信号的动态控制,光源驱动电路必须采用数字电流源电路,该电流源的输出电流由数字解调电路控制。动态调节第一步是实现对陀螺光路输出的实时监测,光纤陀螺仪的组成结构中,PIN-FET 组件是实现将陀螺光路中的光信号转换为电信号的功能模块,通过对PIN-FET 输出的电信号进行采样、解调等处理之后可以实现对光功率的实时监测。光纤陀螺仪在闭环控制下的PIN-FET 输出信号为典型的梳妆波信号,对该信号进行模拟/ 数字转换,将信号当中的直流信号(即平坦区间信号)进行采样和解调,通过相应的滤波算法即可得到输入PIN-FET 的光信号功率,据此得到光纤陀螺仪整个光路的实时光功率波动情况。通过数字电流源对光源驱动电流进行实时调节,实现陀螺整个光路的光功率稳定。
2.1 数字电流源电路设计
数字电流源电路可采用的技术方案主要有基于数字D/A 的模拟电流源电路、基于模拟输入的集成电流源电路和集成数字D/A 的数字电流源电路方案三种,对三种技术方案的整体性能、技术水平、结构适应性、电路复杂度等各方面综合考虑,选取集成数字D/A 的数字恒流源电路作为数字电流源电路的设计方案,原理框图如图2 所示。

电路主要由基准电压芯片和数字电流源芯片组成。基准电压芯片提供基准电压,该电压值与电路的输出电流的范围有关。数字恒流源芯片内部集成了D/A 转换模块,通过控制逻辑接口(例如三线串行接口)实现输出电流的外部控制,其满量程输出电流可以调节。其输出电流的表达式为:

式中: Code 为控制器输入的数字量;N 为其内部集成的D/A 转换模块的位数;VREF 为基准电压,K 为放大倍数。
该方案的优势是可以实现集成化和全数字化。电路核心为数字电流源芯片,辅助电路为电压基准电路,电路的集成度较高,且电路的外围配置简单明确,实现容易,为最优数字恒流电路的技术方案。
2.2 电路板设计
光源数字电流源电路采用基于集成数字D/A 的数字电流源电路方案,核心器件为ADI 公司的ADN8810 数字电流源。ADN8810 是一个可调节的最大输出电流高达300 mA 的12 位高精度电流源,通过两个外部检测电阻来设置最大输出电流值。
ADN8810 的输出电流由下式决定:

式中:IOUT 为输出电流;Code 为数字量;VREF 为基准电压; RS 为采样电阻。
数字电流源电路原理如图3 所示。

ADN8810 具有三个输入信号引脚SDI、SCLK、CS与外部进行连接,图4 显示了这三个信号的时序图,其中地址A3 必须是低电平。

图4 信号时序图
3 系统软件设计
光源光控算法通过数字解调电路中的FPGA 实现,主要对PIN-FET 的输出光信号的光功率实施闭环控制,软件算法流程如图5 所示。

光功率闭环控制软件基于Altera 公司(编者注:Altera于2015 年被Intel 收购)的FPGA 器件EP2C20F256I8,采用Verilog 语音设计实现。系统具体软件设计主要是针对光功率控制算法及其A/D 程序编写:FPGA 在SLD光源驱动系统上电工作后首先完成对各模块的初始化,然后驱动模数转换A/D 模块采集光电探测器的输出电压值并转化为数字信号,经处理后与基准设置值进行对比。根据偏差值计算是否达到目标后,进行算法处理,其结果重新赋值更新。程序主要由控制模块(control)和驱动模块(driver)组成。控制模块主要实现PIN-FET 输入光功率的闭环控制算法;驱动模块主要实现将目标数字量通过SPI 接口传输到数字恒流电路,实现驱动电流的数字化驱动[6]。
4 实验结果与分析
4.1 光功率稳定时间与稳定性测试
实验目的:测试陀螺在全温条件下(-45~+70 ℃)的光功率稳定时间和稳定性采用光功率控制和恒流控制的光纤陀螺仪在全温范围启动时的光功率稳定时间如表1 所示,采用光功率控制技术时光功率稳定性如表2 所示。

4.2 陀螺稳定性测试
试验目的:测试陀螺在全温范围内(-45~+60 ℃)的偏值稳定性。采用光功率控制和恒流控制的光纤陀螺仪的偏值和稳定性如表3 所示。

从上述数据可以看出,采用光功率控制技术的光纤陀螺仪的光功率在全温范围内的稳定时间在0.437 s 左右,而采用恒流控制的光纤陀螺仪的光功率的稳定时间最大需要13.6 s。由此可以看出,光功率控制可以极大地缩短光纤陀螺仪的光功率稳定时间,从而加快陀螺仪的快速启动;在陀螺性能指标上,整体上采用光功率控制的陀螺性能要优于采用恒流控制的陀螺性能。
5 结语
传统的恒流驱动加温度控制方案仅考虑影响光功率的两大因素:电流、温度 ,而光功率控制则实现了对动态光功率的直接稳定控制,包括对未知影响因素的补偿,提高了控制精度;此外,在陀螺上电后快速地稳定了光功率,减少陀螺系统的启动时间。光功率控制的另一个特点就是数字化,可以通过SPI 数字接口动态调节恒流电路的输出驱动电流,既方便电流调试,又可以在使用过程中根据需要动态调整输出电流,光功率控制技术的研究可有效提高光纤陀螺仪的工作寿命和技术水平,经过试验验证后已进行实际推广。
参考文献:
[1] 傅军,常扬,宁治文.光纤陀螺小型化技术研究进展[J].传感器与微系统,2020,39(07):1-4+7.
[2] 季阳.光源设计及其对光纤陀螺性能影响的研究[D].哈尔滨:哈尔滨工程大学,2017.
[3] 殷建玲,鲁军,陈玉丹,等.驱动电路一致性对光纤陀螺用SLD光源特性的影响[J].中国惯性技术学报,2017,25(04):518-522.
[4] 高洋洋,周卫宁,雷莉莉,等.光纤陀螺用超辐射发光二极管启动偏振特性及其影响研究[J].激光与光电子学进展,2015,52(11):217-222.
[5] 刘燕妮,王梦达.功率反馈式高稳定光源电路设计[J].现代电子技术,2016,39(02):122-125.
[6] 岳博.干涉式光纤陀螺数字闭环技术研究[D].哈尔滨:哈尔滨工程大学,2018.
(本文来源于《电子产品世界》杂志2021年2月期)


评论