基于多传感器的多模型机动目标跟踪算法设计

本文选用当今最为流行、应用最广泛的雷达和红外作为传感器,在红外/雷达双模导引头的多传感器平台下展开研究,设计并仿真实现了更接近真实的军事与民用环境的多模型机动目标跟踪算法。仿真结果验证了该算法跟踪性能的有效性。
本文引用地址:https://www.eepw.com.cn/article/201809/388665.htm0 引言
随着信息技术的快速发展和现代军事及民用需求的不断提高,对目标跟踪的精度也相应地提出了更高的要求。在真实的目标跟踪系统中,目标的状态总是处在不断变化中,当目标真实运动模型与算法模型不匹配时,跟踪精度会明显下降,此时采用多模型(MulTIpleModel,MM)机动目标跟踪算法将会成为最佳选择。然而,当今的多模型目标跟踪方法大都停留在理论层面,对于多模型的实际应用价值及各模型的应用场合都需要做进一步的研究。
本文选用当今最为流行、应用最广泛的雷达和红外作为传感器,在红外/雷达双模导引头平台下开展对交互式多模型机动目标跟踪算法的研究,并加入噪声干扰,更接近真实的军事与民用环境。首先搭建红外/雷达双模导引头仿真平台,进而设计基于多传感器的多模型机动目标跟踪算法,采用扩展卡尔曼滤波,最终实现算法的软件仿真及跟踪性能评估,验证了所设计方法的有效性和实用性。
1 多传感器平台搭建
雷达和红外传感器是目前常用的两种目标探测和跟踪传感器,采用雷达为主、红外成像传感器探测为辅的信息融合系统进行目标跟踪能够使系统降低对敌方干扰的脆弱性,提高系统可靠性,现已广泛应用于各个领域。因此,本文选取雷达与红外双模导引头作为传感器,模拟生成多传感器的数据生成模块,为多模型机动目标跟踪算法提供良好的检测平台。
毫米波雷达导引头的观测数据包括观测系下的视线方位角、视线俯仰角、弹目距离、多普勒频率、雷达信噪比等信号。经过坐标转换,得到的参考系下的雷达观测数据,建立如下雷达观测方程:

φR为雷达视线方位角,θR 为雷达视线俯仰角,r 为弹目距离。V1(k) 是均值为零、协方差阵为R1(k) 的白高斯噪声向量。
红外成像导引头的观测数据包括观测系下的视线方位角,视线俯仰角等信号。经坐标转换得到参考系下的红外观测数据,建立如下红外观测方程:

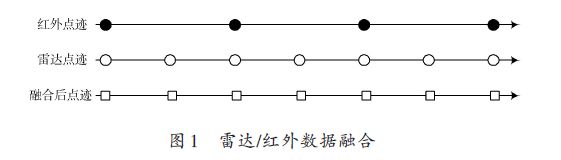
本文综合应用点迹合并方法和点迹串行处理方法,搭建毫米波雷达和红外数据融合的多传感器平台。假设雷达的扫描周期为5 ms,红外的扫描周期为10 ms,所以首先将雷达和红外点迹数据串行合并成为点迹数据流,进行点迹-航迹相关;对于在10 ms时刻,若雷达点迹和多个红外点迹均与航迹相关上,则对这些点迹进行点迹压缩合并,如图1所示。
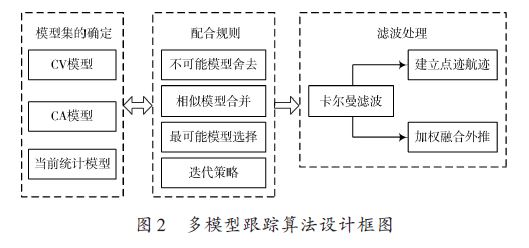
2 多模型跟踪算法设计
本文选取目标跟踪中经常使用的几种目标运动模型组成模型集,然后根据模型间的配合规则设计多模型选取算法,如去掉不可能模型,合并相似模型,最可能模型选择算法以及基于期望最大算法的迭代策略等,进而对所得到的融合数据应用扩展卡尔曼滤波算法建立外推点迹,最终形成新航迹。设计框图如图2所示。
2.1 模型集的确定
大部分的跟踪算法都是基于模型的,因此目标运动模型设计是机动目标跟踪的基本要素之一,也是一个关键的问题。在建立机动目标模型时,一般的原则是所建立的模型既要符合实际机动模式,又要便于数据处理。
本文选取目标跟踪中常用的几种运动模型组成模型集,包括CV模型、CA模型和当前统计模型。
2.2 配合规则
多模型算法按配合规则基本上可分为三代,静态多模型算法(SMM)、交互式多模型算法(IMM)、变结构多模型算法(FSMM)。以上三代多模型算法跟踪精度逐渐升高,同时算法的复杂度也依次升高、可实现性逐步变差。综合考虑算法的实用性和代价,IMM算法的交互方式更合理有效一些,是目前研究应用最多、被认为是最成功的一种算法。
因此,本文采用IMM 算法作为模型之间的配合规则,完成多模型跟踪算法的设计。
2.3 滤波处理
本文选用扩展卡尔曼滤波方法对融合后的数据进行滤波处理。首先建立状态方程和观测方程,根据前一个估计值和最近一个观测数据来估计信号的当前值,并用状态方程和递推方法来进行估计,其解是以估计值形式给出的。由于滤波是采用递推算法,所以数据存储量少,运算量小,非常适合实时处理系统的应用。
3 跟踪效果仿真
选取扫描周期TIR =0.02 s对目标进行跟踪模拟。目标初始位置为(1 000,1 000,1 000)m,初始运动速度为(300,300,300)m/s,初始加速度为(10,10,10)m/s2.
图3 分别为x 方向,y 方向,z 方向位置估计误差。
图4反映了位置估计误差的RMSE.
图5 为目标运动轨迹和跟踪轨迹的三维仿真示意图。
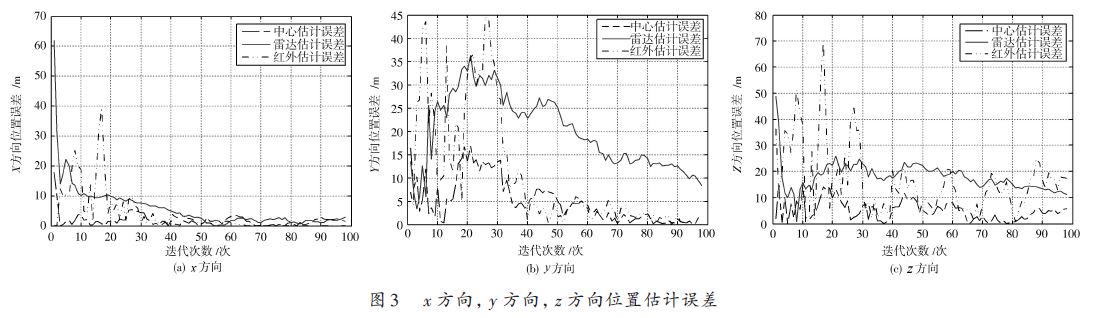
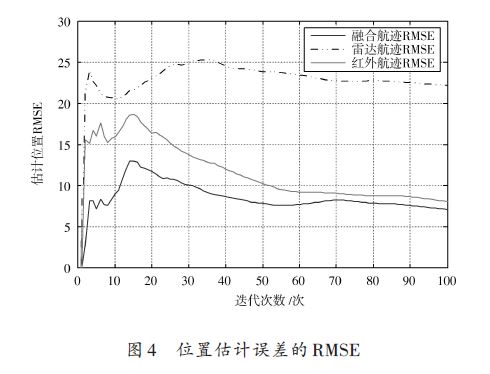
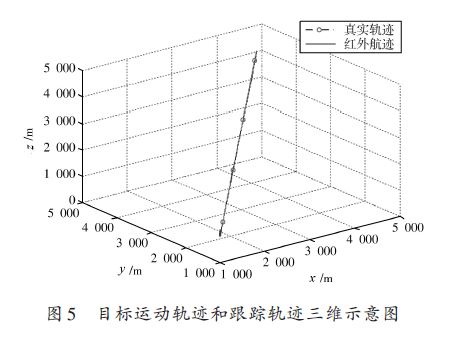
仿真结果显示:在基于雷达/红外双模导引的多传感器仿真平台下,所设计的多模型机动目标跟踪算法跟踪精度相对较高,收敛较快,迟滞较小。
4 结语
本文主要研究基于多传感器的多模型机动目标跟踪算法,在更加接近真实环境的雷达红外双模导引模拟仿真平台下设计了多模型机动目标跟踪算法,并对其跟踪性能进行仿真验证,仿真结果证实了该算法的有效性和实用性。





评论