传感器在机器人控制中的信息融合技术
设计一款可以寻线,冲线并在过程中实现投球功能的机器人,需要传感器技术的支持,在实验中机器人的整体结构中安装了三个红外传感器和一个光感传感器,这里主要分析各传感器的实际应用总结。
本文引用地址:http://www.eepw.com.cn/article/201710/367862.htm本论文主要介绍是以单片机ATmega16为智能控制系统核心,在移动的机器人系统中应用光感传感器实现机器人对障碍物的一系列行为;通过红外传感器实现机器人在移动过程中对黑色胶条的寻线,转弯的过程。
1.红外传感器的应用
红外传感器一般是由光学系统,探测器,信号调理电路及显示单元等组成的。红外探测器是红外传感器的核心,它是利用红外辐射与物质相互作用所呈现的物理效应来探测红外辐射的。自然界中任何物体只要温度高于绝对零度都能产生红外辐射,而且温度越低的物体辐射的红外线波长越长,根据需要通过调节光晕的大小精确度选择性的接受某一定范围内的波长就可以达到测量的目的,红外传感器能把红外辐射量变化转换成电量变化。
本次实验中我们用的SHARP电红外传感器,它的制作简单,成本低,安装比较方便,性能稳定,但是因为长期的使用,其精度有所降低。
在机器人行进中,我们借助红外传感器和地板上的色带轨迹可以沿着既定路线自动行驶,路径可任意,由于我们机器人的展示在室外,机器人在辨识路径时,可能受到自然环境下可见光的影响,导致光感传感器辨识不准,而红外传感器可以滤除自然光照条件下的各种光,可以使得反馈值的准确性大大增加。
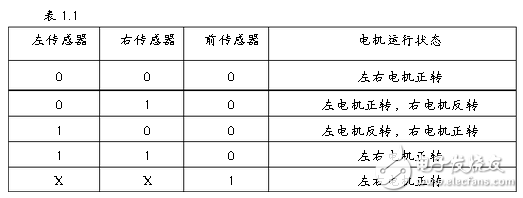
因为我们的轨迹线是黑色的而两侧是白色的,左侧的传感器控制右电机,而右侧的传感器控制左电机。假设机器人的纵轴中线向左偏离黑色轨道线时,其中右侧传感器的光电管探测到轨迹线反射回来,是该传感器输出为高电平,而左侧传感器仍保持原状态,输出为低电平。通过与程序中的数值比较(见表1.1),此刻应该反馈的结果是左侧电机正转,右侧电机反转,使得车身相反方向转动(角度可以通过程序控制,且转角度越小,行进过程中越精确,时间停顿越小),这样偏离的方向可以修正。在矫正路径中,两只电机不断交替工作,是机器人实际上是紧靠着轨迹线向前方进行“之”字形运行的。我们的机器人上的第三只传感器作为冲线装置使用,它的优先级比另外两个要高,当其反馈一个高电平以后,其余两个传感器的反馈信号直接屏蔽,机器人直线运行冲出终点线。
因为第三只传感器优先级的问题我们再设计中结构和角度的设计,需要不断在实验中修改,以达到最满意我们要求的精度。
2.光电传感器
光感式传感器是基于光电效应的传感器,在收到可见光照射后即产生光电效应,将光信号转换成电信号输出。光电传感器一般是由光源,光学通路和光电元件三部分组成。光强,光线的遮挡,透射,反射等测量多种物理量,如尺寸,位移速度,温度等,也因此这是一种应用极广泛的重要敏感器件。
我们在实验中应用的是反射型光电开关,它在光电器的一端有两个感受器,一个是发射器,一个是接收器。若再在发射器延长的一定范围内,若无障碍物,则不会产生任何反馈,处于低电平状态,机器人的机械臂仍维持原状态;当其方向上产生障碍物遮蔽,则会在传感器和遮挡物之间形成光线反馈到接收器上,光电器会产生一个脉冲反馈回cpu,使得机械臂产生动作。
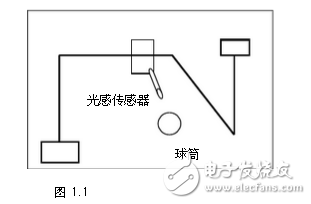
机器人的行进中,考虑到机械臂在执行一系列动作时会产生一定时间的延时,故我们将光电传感器成45度角向前倾斜,提前感知圆柱筒,当光感器感知遮蔽物时,机械臂进行反转,并将爪中的小球投入圆筒中,完成投球动作。(图1.1)
在不断的实验测量中,我们不断调整机械臂的高度,光感器的角度,与遮蔽物的距离,以达到最好的测量效果,使小球精确的投入前提下,尽量不减缓小车前进的速度。
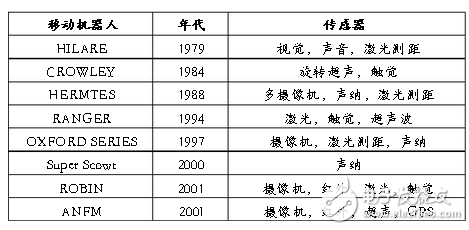
以上两种只是我们在制作简易的移动机器人中传感器的使用,在实际的实验室创作中还会用很多不同种类的传感器。机器人是一门涉及技术领域非常广泛的学科,其中传感器和控制技术是核心的技术,所以绝大部分机器人应用中都可以看到传感器的存在,所以多传感信息融合技术在机器人领域有着广阔的应用前景。而最突出的,应该是很多研究机构为了探讨多传感器数据融合的一般规律而在实验室设计的各种可移动器人或各种环境下的自动驾驶装置。从网上搜寻了一些多传感器融合的比较著名的作品 。
而这种多传感器信息融合系统与单传感器信号处理方式相比,多传感器信息融合系统可以有效的利用传感器资源,可以更大程度的获得被测目标和环境的信息量。多传感器信息融合和单传感器信号处理方法之间也存在本质的区别,其关键在于信息融合所处理的多传感器信息具有更复杂的形势,而且可以在不同的信息层次上出现。
多传感器信息融合的基本目标是基于各传感器分离观测信息,通过对信息的优化组合导出更多有效信息,这是最佳协同作用的结果。它的最终目的是利用多个传感器共同或联合操作的优势,来提高整个传感器系统的有效性。
多传感器信息融合技术在移动机器人中的应用现在已发展成为一个热门的研究领域,为移动机器人探索不确定和未知环境提供了一种技术途径。而移动机器人是一个多学科交叉发展的领域,现今只是设计了比较底层的机器人硬件和软件,以后需要完善这些理论和结果,此外,还有许多问题需要继续深入的研究。













评论