盘点无人机避障技术原理及厂商

什么是无人机避障技术?
本文引用地址:https://www.eepw.com.cn/article/201710/367635.htm顾名思义就是无人机自主躲避障碍物的智能技术。很多玩过无人机的小伙伴们 都知道,有避障功能的无人机和没有避障功能的无人机,可以说体验是大不相同的!无人机自动避障系统能够及时地避开飞行路径中的障碍物,极大地减少因为操作失误而带来的各项损失。在减少炸机事故次数的同时,还能给无人机新手极大的帮助!
无人机避障技术发展阶段和趋势
根据目前无人机避障技术的发展以及其未来的研究态势,有资料分析认为无人机避障技术可分为三个阶段,一是感知障碍物阶段;二是绕过障碍物阶段;三是场景建模 和路径搜索阶段。这三个阶段其实是无人机避障技术的作用过程。从无人机发现障碍物,到可以自动绕开障碍物,再达到自我规划路径的过程。
可能有人会问无人机达到第一个“发现障碍物”的阶段不就很容易避开障碍物了?这第二个阶段是不是有些多余!其实不然,无人机避障的三个阶段的划分都是有技术作为依据的。其每个阶段具体的技术分析如下:
第一阶段,无人机只能是简单地感知障碍物。当无人机遇到障碍物时,能快速地识别,并且悬停下来,等待无人机驾驶者的下一步指令!
第二阶段,无人机能够获取障碍物的深度图象,并由此精确感知障碍物的具体轮廓,然后自主绕开障碍物!这个阶段是摆脱飞手操作,实现无人机自主驾驶的阶段!
第三阶段,无人机能够对飞行区域建立地图模型然后规划合理线路!这个地图不能仅仅是机械平面模型,而应该是一个能够实时更新的三维立体地图!这将是目前无人机避障技术的最高阶段!
目前,市面上主流的电动多旋翼无人机避障系统主要有三种,分别是超声波、TOF(激光雷达测距的一种)以及正有望成为主流的视觉测距。以下是国内外无人机避障技术最新应用案例。
1、零度Xplorer 2:激光雷达TOF测距
TOF是TIme of flight的简写,直译为飞行时间。所谓飞行时间法3D成像,是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。
使用这种方式光波容易受到干扰,系统发出的光,必须避开太阳光的主要能量波段,从而避免太阳光的直射、反射等对避障系统造成干扰。该原理需要非常精准的时间测量,需要专用处理芯片,而芯片价格则较为高昂。
零度在CES2016上发布的Xplorer 2,采用的便是TOF测距方案。无人机上的“蘑菇头”就是自动避障模块,该避障模块可以实现在6m有效避障距离内,以每秒50次的速率实现360°全方位扫描。

Xplorer 2自动避障模块
2、昊翔Typhoon H:Realsense(单目+结构光)
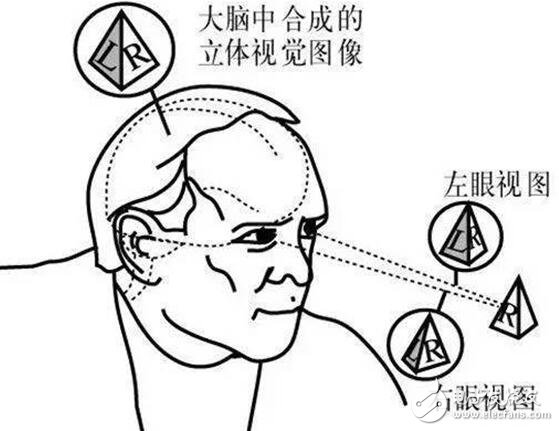
Realsense 的技术原理是,它采用了“主动立体成像原理”,模仿了人眼的“视差原理”,通过打出一束红外光,以左红外传感器和右红外传感器追踪这束光的位置,然后用三角定位原理来计算出 3D 图像中的“深度”信息。通过配有深度传感器和全1080p彩色镜头,能够精确识别手势动作、面部特征、前景和背景,进而让设备理解人的动作和情感。据 Intel方面对外透露的数据,Realsense的有效测距可达10米。
Realsense属于“单目+结构光”,即单个摄像头加结构光 发射器构成深度摄像头。不过结构光却是个“见光死”,“结构光只适合暗环境、室内。为啥intel弄个仿热带雨林的暗环境?因为会受到干扰啊!”雷动云合 创始人廖鸿宇说,由于将3D深度摄像头改为2D深度摄像头,其“单目+结构光”的智能导航模块只需200元。

Typhoon H整合了Intel的Realsense模块
3、大疆精灵Phantom 4:双目视觉+超声波
双目的测距原理,就像我们人类的两个眼睛,看到的图像不一样,假如同一个点,两个眼睛看到两张图像是存在差异的,而通过三角测距是可以测出这个点的距离。
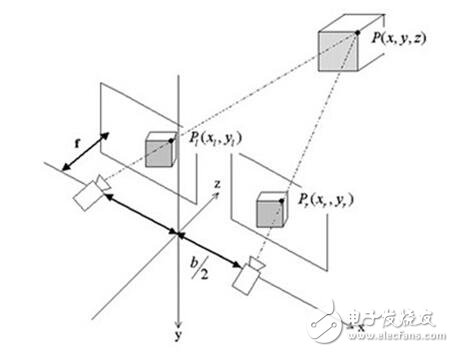
双目视觉系统原理图
Phantom 4增加了双目避障,其实是沿用了guidance的核心算法,能够识别最近0.7米,最远15米的障碍物;水平视角 60°,垂直视角为30°。双目视觉的优势体现在,在远距离,双目视觉能保证三维精准信息,比如远处的两座山能看出一个近一个远。当然,远处的小目标是不可以的。

Phantom 4 下视视觉定位模块
4、极飞:夜间避障采用主动近红外照射技术
极飞做夜间避障是因为他们的多数植保作业是在夜间进行。其实他们实现夜间避障的原理并不复杂。
先说避障原理,向前避障是双目避障,它利用成像设备的两只眼睛来获取被测 物体的两幅图像,通过计算图像对应点间的位置偏差来获取物体的三维信息,包括摄像头与物体的距离和物体之间的距离等。是基于视差原理,是计算机视觉的一种重要形式,这和人眼感知物体三维信息的原理相似。参照下面这个有趣图片。
而夜间避障是采用了这个主动近红外照射技术,简单来说就是加了一个特殊的手电筒和并改造了眼睛。夜间这个眼睛几乎看不到(和现有大疆产品一样),而极飞采用的双目是由两个黑白镜头组成,从380-1080nm 波段都可以成像,也就意味着不仅能看见可见光,还能看见人眼也看不见的红外线。

(中间长条装为发射,两侧为接收)
无人机会主动发射近红外线光线,近红外光是介于可见光和中红外光之间的电磁 波,虽然人眼看不到,但能作为夜晚的光源,双目的每一个镜头就能接收到环境中的红外线的反馈,经过双目计算后(和白天的计算处理相同)就可以「感知」到环境和障碍物了。而且避障距离和白天相比没有变化,都是 30 米(角度:水平 FOV 65°)。
其实这个原理并不是极飞所创造,它在军事当中运用很早,在美、德等国二战期间,第一代的主动红外探测装置用在了战场上,通过自带的光源设备主动产生近红外辐射照射目标区域,然后接收目标返回的红外信号,转换为可视图像进行观察分析。例如德国研制的车载主动红外夜视仪可用于夜间无灯光条件下隐蔽行进,并通过这种手段避开同盟国的监视,秘密地把 V-2 导弹运送到前线。
而说到这里,目前所有的民用无人机都不能在夜间或者说光线不好的情况下避障吗?其实不然,我们可以看看那些本来见光死的避障无人机,在晚上是不是能够活过来。
5、美国俄亥俄州的公司Oculii:四维雷达技术
传统的民用雷达大多只能提供二维的信息,但是,人们都生活在三维的空间里,二维信息是远远不够的。举例来说,现在的民用雷达都无法测量车子的高度,而这对于无人驾驶、无人机等方面的应用就有很大的局限性。位于美国俄亥俄州的公司Oculii,开发了世界上第一个可以商用的四维雷达,使得无人机在三维空间,获取上下左右的空间信息。
小结:未来无人机不只会采取单一技术实现避障功能,可能会采取多种避障技术集成的手段来实现不同场景下的避障。






评论