使用FPGA实现ADAS设计的功能安全考虑

ADAS需要满足特殊的功能安全要求。2011年,载重3.5吨以下客车的ISO26262标准发布,其目的是降低系统出现故障后造成危险状态的风险。这一标准要求采用严密的设计过程,在应用执行过程中探测随机硬件故障,以减少系统性故障。
应用开发人员定义了专门的安全目标,针对每一目标分配了相应的汽车安全完整性等级(ASIL)。对于应用中最高级别的ASIL,通常定义了每一组件从开发直至工作到寿命终了时应满足的要求。图1显示了从客户需求角度看,ADAS应符合的ASIL目前的范围。
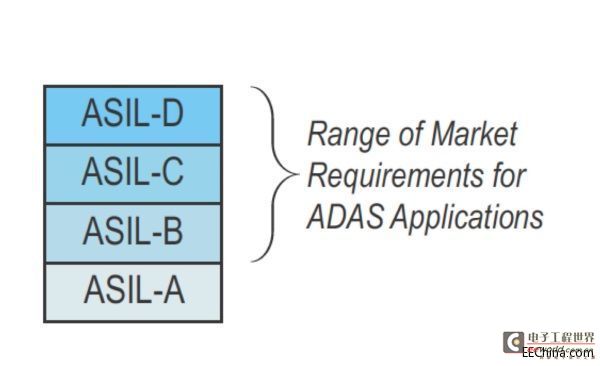
图1.ADAS ASIL市场需求(注:Range of Market Requirements for ADAS Applicatios:针对ADAS应用的市场要求范围)
ASIL-B是市场上的最低级别,而某些应用则要求采用ASIL-D以支持某些功能。越来越多的ASIL有更严格的要求。在某些具体实现中,组件的通用ASIL或者条目(系统)等级都会带来不必要的复杂度,影响了开发成本和进度。分析系统概念,得出安全概念和要求后,还可以把应用分成几种不同的步骤,这就具有不同的ASIL,更容易实现,而且实现的效率更高。
例如,前端摄像机应用使用了ADAS中常见的一个图像传感器。图2显示了系统的高级结构图。
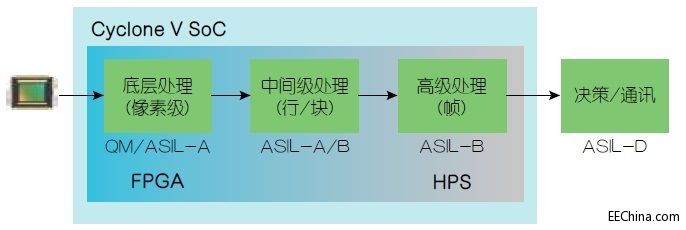
图2.高级单前端摄像机ADAS
一个图像传感器连接至图像处理器,例如可以是AlteraCyclone VSoC。信号处理链和数据流被分成四个部分。首先,通过把图像变换成更实用的表现形式,在像素级上进行底层处理。然后,对行图像或者块图像进行中间级处理,使用相应的算法,提取出边沿等特征。下一步,进行高级处理,提取出每一帧的数据,探测目标并分类。然后,系统会跟踪目标,如果需要采取措施,则与刹车或者转向电子控制单元(ECU)进行通信。
在FPGA上,底层和中间级处理能被非常高效地实现,但是,用户也可以在Cyclone V SoC硬核处理器系统(HPS)的Cortex-A9处理器等CPU上实现某些中间级处理。高级处理主要是控制代码,可以映射到HPS中的一个或者两个Cortex-A9上。处理链的最后一步是目标跟踪和决策,可以在外部微控制器上完成这一步。
在整个处理过程中,每一步将输入数据进行简化得到更有意义的数据,数据减少意味着提高了安全临界。因此,底层实现可以分成质量管理(QM)或者底层ASIL (例如,ASIL-A)。原因是一个像素期间出现的故障对后续算法性能的影响很小,可以忽略。在这个例子中,假设中间级处理符合ASIL-A或者ASIL-B,识别目标并进行分类的高级处理功能应符合ASIL-B。对目标进行分类后,生成目标表,将之提供给微控制器,进行目标跟踪和决策。这是信号链最关键的部分,Altera认为它应该符合ASIL-D,这对汽车的行为有直接影响。
在这类应用中,最好对数据流进行更全面的分析,每一级的安全临界定义对整个系统的性能会产生直接影响。对前面计算级有太高的安全要求会导致难以满足系统性能目标,而且对系统整体安全的影响很小。但是,处理链底层也会出现故障,对系统安全功能产生较大的影响。例如,底层处理功能的永久故障会导致高层数据永久损害,但是,合理性检查很容易探测到这类故障,对系统性能的影响相对较小。

评论