基于颜色识别的智能小车集群控制
小车在防碰撞过程中若出现全部车辆停止(即进入锁死状态),则启动应急预案,使边缘小车在原地向锁死反方向转动相应的角度,并行走一段距离,以解除锁死状态。
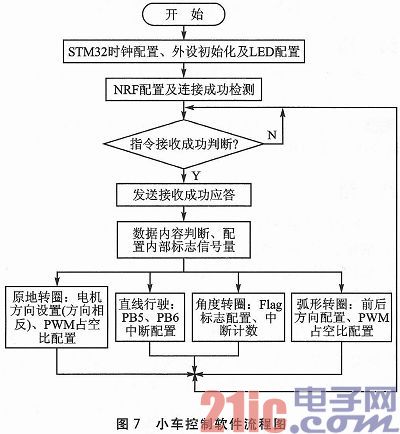
本文引用地址:http://www.eepw.com.cn/article/201610/309878.htm3.4 小车控制软件流程图
小车控制软件流程图如图7所示。
4 整体性能测试
为防止因环境颜色和光照的影响,测试场地为一块2 m×3 m的长方形布料,刚好是摄像头的拍摄范围。
①小车测试。通过直线行驶指令,将小车放在测试场地中,使小车直线行驶一段距离。小车将获得两个不同的PWM信号占空比,作为下一次启动时的配置参数。
②小车顶部色盘像素的采集。为消除因光照强度所引起的颜色误差,需先将与小车顶部色盘相同颜色的纸片放在场地中间,摄像头将采集这一坐标的像素值作为参考值,用于实际测试过程中的颜色识别与定位。
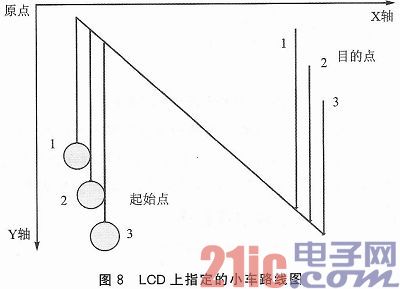
③为小车设置起跑路线图。通过LCD屏,在上面为小车指定运动的路线图,其后小车将按照设定的轨迹行走。行驶过程中小车很好地实现了集群之间防碰撞的功能。
小车路线图如图8所示。
结语
基于颜色识别的集群控制系统,可以通过颜色的采集来实现定位,是自动控制和人工智能方面的一种可行方式,具有运行稳定、使用方便的优点。而多控制对象的集群控制理论的研究,使得多目标协同工作成为可能。基于此模式的智能控制设备具有广阔的应用前景。











评论