一种GPS接收机中自动增益控制的设计

摘要:在GPS接收机中,由于不同的传输距离以及多路径衰减的效应,使得接收机收到的信号强度是不固定的,所以采用一个自动增益控制电路来将信号强度处理成一个固定的强度大小。本文的目的在于,分析与设计一个应用与GPS卫星导航接收机的自动增益控制电路。介绍了自动增益控制的原理,对相关的电路设计进行了分析,并给出了仿真结果。
本文引用地址:https://www.eepw.com.cn/article/201610/306635.htmGPS(Global Position System)是全球定位系统的简称,目的是在全球范围内对地面或空中目标进行准确定位和监测。随着全球性空间定位信息应用的日益广泛,GPS提供的定位服务给人们的生活带来了巨大的变化和深远的影响。自动增益控制(Automatic Gain Control)系统是无线接收机的关键模块,对于GPS接收机来说,在实际的应用中进入接收机频带的信号很多,除了有用信号,噪声的干扰、环境的变化都会使信号起伏变化,影响信号的处理,基于以上目的需要一种能够自动调节增益,并且具有较大增益范围的系统来控制信号的变化,这就是自动增益控制系统。
自动增益控制系统在接收机中主要完成以下两方面工作:第一,防止信号过大引起接收机过载。对于接收信号来说由于距离不同,接收信号也有强弱之分,当距离较近时信号可能会过强,距离远时信号会较弱。这时要求接收机能够适应这种变化,信号强时减小接收机增益,信号弱时增大接收机增益。第二,补偿接收机增益不稳定。当接收机工作时,电压的不稳定性、工艺参数、温度的变化都会引起增益起伏,自动增益控制就是补偿由接收机本身造成的误差。
1 AGC工作原理概述
自动增益控制主要包括3个部分:自动增益控制放大器、脉冲宽度调制(PWM)式自动增益控制和一个脉冲宽度译码器。其中自动增益控制放大器和脉冲宽度译码器在射频芯片中实现,脉冲宽度调制(PWM)式自动增益控制在基带芯片中实现。
其工作原理为:自动增益控制放大器负责放大中频信号保证其正常被A/D采样为两位数字信号SIGN、MAG,其中MAG信号的占空比反映了中频信号的幅度,即在一定程度上反映了自动增益控制放大器的增益;脉冲宽度调制(PWM)式自动增益控制根据输入的MAG信号(可能为I|Q分离后的MAG信号)对信号增益进行控制,并最终反馈输出一个脉冲宽度调制信号以重新调节自动增益控制放大器的增益;脉冲宽度译码器负责将这一脉冲宽度调制信号解调为5位二进制增益控制字,并输出到自动增益控制放大器的每一个增益级,达到自动调节放大器总增益的目的。
基带中的AGC主要是完成对I路和0路的MAG中1的个数进行一个统计,如果统计出的结果大于设定的阈值,那么就会增加输出的增益调整脉冲宽度,使得信号增益降低;相反地,如果统计出的结果小于阈值,则减小增益调整脉冲宽度,使得信号增益增加。
2 各模块具体设计
2.1 自动增益控制放大器
自动增益控制放大器由5位二进制增益控制字(B1~B5)控制开关的五级放大电路(agc5、agc43、agc21)级联组成。每级agc放大电路由两级不同增益的差分放大管串联而成,偏置电路为每级差分对放大管提供相同的尾电流,其中一级放大管由B1~B5低电平有效的开关控制,集电极接大的负载电阻,为高增益放大级;另一级放大管由B1~B5高电平有效的开关控制,集电极接同样的负载电阻但发射极接负反馈电阻,增大了放大管的线性工作范围但降低了增益,为低增益放大级。这样,B1~B5不同的逻辑位控制输出不同的增益。
各级放大管增益的设计遵循以下原则:
agc5、agc43采用阻容级间耦合方式,agc21采用直接耦合方式,并在输出接有电压buffer以保证放大器的负载能力。耦合阻容额外提供了整个放大器的上限频率,而放大器本身及电压buffer(射随器)提供了下限频率,使得整个放大器的频率响应为一带通形状。
2.2 脉冲宽度调制(PWM)式自动增益控制
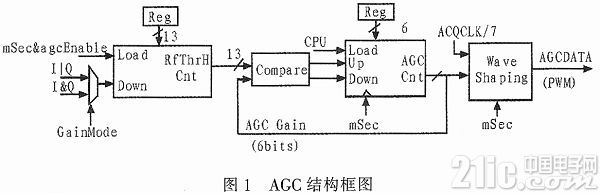
图1说明了脉冲宽度调制(PWM)式自动增益控制的硬件实现架构。这个模块从数据分离器中取I和Q的幅度位(MAG)输出,计算1ms内累加的IQ或I|Q,即通过MAG信号的占空比计算当前AGC的增益。然后将计算结果与可编程的RF阈值(由寄存器写入)做比较,以此来决定下一个毫秒 AGC的增益。累加和比较操作是通过一个减计数器(RfThrHCnt)实现的,这个计数器的初始化值是在毫秒边沿由13位可编程的RF阈值设定。若 IQ或I|Q为0,则RF阈值保持不变;若IQ或I|Q为1,则RF阈值减“1”。1ms内RF阈值减计数的最终结果送入下一级 AGC Cnt中。
RF阈值的设定原理如下:在I|Q的情况下,对1msI和Q中1的个数进行累加。在整个1 ms的数据中,出现1的概率为0.3,出现0的概率为0.7。则I=1,Q=1的概率为0.3x0.3 =0.09,I=1,Q=0的概率为0.3x0.7=0.21,I=0,Q=1的概率为0.3x0.7=0.21,因此I|Q=1的概率为0.09+0.21+0.21=0.51。在38F0模式下,RF阈值=(1 023x38/2)x0.51 ≈9 913=2688,加上寄存器控制位的值8 000,就可得到写入寄存器800d123e中的阈值A688。
AGC Gain由一个可加/减计数器(AGC Cnt)来实现。这个计数器的初始化值是在毫秒边沿由6位可编程的AGC Gain值(由寄存器写入)设定。若1 ms内RF阈值减计数的结果为0时,则AGC Gain值加“1”;若1 ms内RF阈值减计数的结果不为0时,则AGC Gain值减“1”;最终每1 ms输出一个AGC Gain值(为6位二进制数),从一个毫秒到另一个毫秒AGC Gain值加“1”或减“1”。
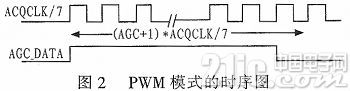
AGC Gain值可以通过PWM模式输出,将AGC Gain值与ACQCLK的7分频后的时钟做一运算,输出脉宽信号AGC_DATA送到RF电路中,数据的脉冲宽度等于(AGCgain+1)*(period of ACQCLK/7),其时序如图2所示。
2.3 脉冲宽度译码器
该模块将AGCDATA脉宽信号译码为5位二进制增益控制位,来控制自动增益控制放大器的五级不同增益的放大电路。该电路由延时部分、逻辑转换部分、计数器部分、数据输出部分4部分组成。
延时部分由3个DIG_DLY_7组成。DIG_DLY_7的功能可以看作是当时钟上升沿到来后延时7个时钟周期后触发数据。
逻辑转换部分产生3个逻辑:1)将AGCDATA串行脉宽数据(一个脉宽包含M个时钟周期)的上升沿延时3T(T为7个时钟周期)个时钟单位,下降沿延时 T个单位并与pwm_clk作与操作,变为可处理的脉宽数据,其脉冲宽度中包含M-14个时钟周期,记为DATA0信号。2)产生比AGCDATA串行脉宽数据的上升沿延时T个时钟周期,宽度为7个时钟周期的RESET信号。3)产生比AGCDATA串行脉宽数据的下降沿延时2T个时钟周期,宽度为T个时钟周期的触发时钟信号,记为CLK0信号。
计数器部分由若干个分频模块组成。其操作过程如下:在AGCDATA串行脉宽数据的一个脉宽上升沿来临后延时3个时钟周期接收到RESET信号,对所有的分频模块进行复位。分频模块进行复位后,在AGCDATA串行脉宽数据的一个脉宽上升沿来临后延时9个时钟周期,DATA0数据输入,进入 DIV7cmos模块,其分频机制如下:因为DIV3cmos模块中包含两个D触发器,当DATA0数据的第一个上升沿到来后不输出数据,到第二个上升沿到来后触发输出第一个上升沿,以后每隔3个上升沿触发一次,占空比为1:2。
总结输入数据DATA0与输出数据所包含的上升沿的关系:
a b
1个上升沿 0
2个上升沿 1
5个上升沿 2
8个上升沿 3
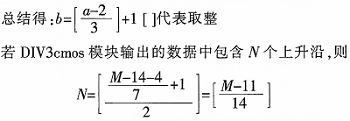
下面进入若干个二分频器模块(组成计数器),数出每个输入数据所包含的上升沿数,并将结果送入数据输出部分。
B1处计数结果应为:![]()
B2~B5以后逐次进位。
数据输出部分由CLK0信号触发数据,即在AGCDATA串行脉宽数据的一个脉宽下降沿来临后延时6个时钟周期输出由计数器部分计出的数据。
3 仿真结果
1)前仿结果:
①增益列表及步长如表1所示。
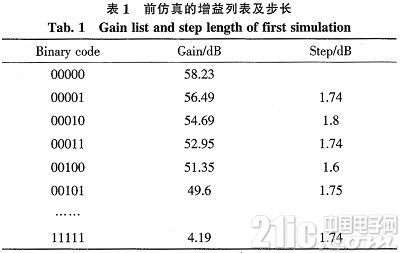
由上可知:Gain Range=54.04 dB。
②频率响应如表2所示。
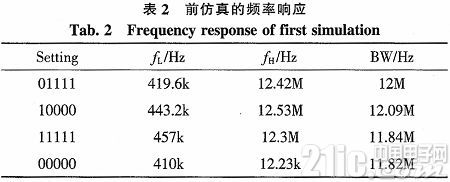
由上可知:agc的小信号-3dB带宽在12M左右。
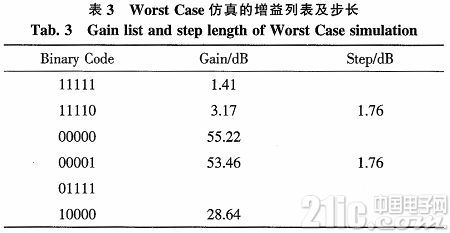
2)Worst Case仿真结果如表3所示。
3)负载影响:
负载接adc后基本不影响agc增益。
4 结束语
用38f0下的AGC阈值和初值,导致的一个结果是输出的脉冲宽度为368 ns。虽然增益很大,但是可以搜星,定位。一旦改变值,则不能搜星,定位。对这个现象的解释暂时不清楚。

评论