基于现场总线WWT型PLC水轮机微机调速器的设计

一、WWT微机调速器的数学模型
本文引用地址:https://www.eepw.com.cn/article/200793.htm1.1控制规律的选择
水轮机调节设备是通过调节导水机构的开度来调节水轮机的流量及其流态的,这种调节需很大的推力,所以调速器的执行机构采用一级放大或二级放大的油压装置,从而利用其推力推动接力器来实现。
从自动控制原理的角度上讲,控制水轮机流量存在着水轮惯性,对调节系统的动态稳定和响应特性带来不利影响,水轮调速系统是一个复杂的、多变的、非线性的控制系统。
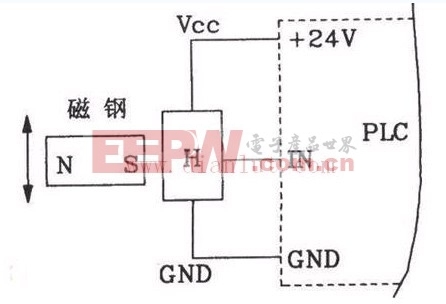
水轮机调速器由测量元件、放大校正元件、给定元件、执行机构、反馈元件等组成,发电机组作为构成闭环控制系统。它的控制过程是测量元件把机组转速n(频率)或其他被调参数测量出来,与给定信号和反馈信号综合后,经放大校正元件去控制水轮机组,同时反馈元件又把导叶开度变化的信号返回给加法器。
1.3 PID调节的控制算法
上面说到水轮调节系统是一个复杂的控制系统,因此选择合适的控制规律是一个号的控制系统的关键因素之一。在设计WWT型微机调速器时我们选择了PID调节规律,它的结构简单,并且提高控制系统的稳定性和可靠性。
PID控制规律在实际中是由PLC的 软件程序来实现的,PID的输入为测量的频差,其运算结果YPID为对应的导叶开度Y的数字量,YPID送入交流伺服电机驱动器,以控制电机的运转位置,电机的转动位置通过电液转换器对应导叶接力器的开到对应的开度Y。
为实现有差调节,调差的反馈信号可取自位置环控制式PID运算结果,并与 功率给定信号的数字调节量相减,然后经Bp后与频差信号综合,改综合信号送入PID调节通道。
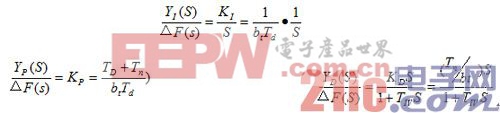
PID微机调节器的控制算法为:

将上式进行拉氏变换得:

式中负号表示正的频差对应负的接力器的开度。
式中是PID调节的时间连续的传递函数表达式;若用PLC程序实现则必须进行离散计算。
将式中的比例、积分、微分单独的表达式写出来:
用PLC程序来实现则必须进行PID调节计算,而采样周期t式离散计算过程中极为重要的量。WWT型微机调速器是以种借助程序实现调节和控制功能的数字电子装置,它是以巡回扫描的或定时处理的原理工作的。PLC完整的执行一次可编程器系统、用户程序所占用的 时间为采样周期。
二、WWT微机调速器的数学控制方案的设计
2.1 WWT型PLC微机调速器系统原理
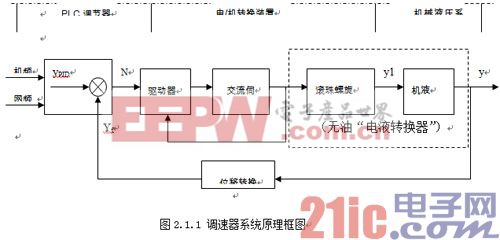
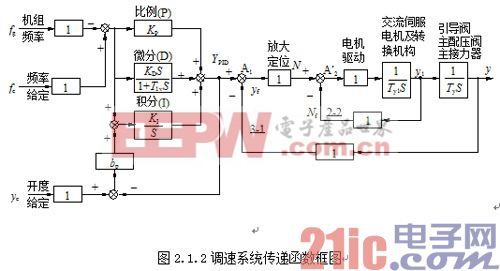
由交流伺服电机(位置环)及滚珠螺旋自动复中装置构成电液转换器,由定位环控制PLC微机调节器的定位模块,根据PID调节器输出YPID与主接力器反馈(通道3-1)yf的差值,向交流伺服电机驱动器送出与此差值成比例的有方向的定位信号N,交流伺服电机同轴的旋转编码器将实际转角(位移)y1以脉冲数的形式Nf送回驱动器,从而形成了以Ty1(交流伺服机构反应时间常数)为特征参数的小闭环。在调速器稳定状态(静态),y1使主配压阀处于中间平衡位置。
YPID至y的传递函数为:
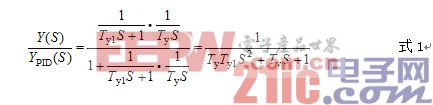
由于交流伺服电机具有很高的频率响应特性,其反应时间常数可以忽略(取Ty1=0)不计,上式传递函数简化为

2.2 PLC系统结构
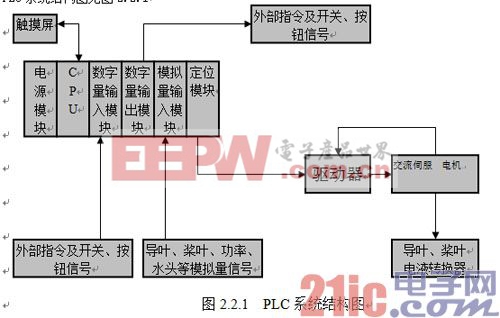
在调速器电气部分的控制核心的PLC系统包括CPU模块,数字量输入模块,数字量输出模块,模拟量输入模块,定位模块、触摸屏等。PLC系统采集现场数据,进行PID运算及状态控制,输出控制信号。

伺服电机相关文章:伺服电机工作原理






评论