基于XC164CM的汽车电动助力转向系统

前言
本文引用地址:https://www.eepw.com.cn/article/197910.htm近年来, 动力转向系统已成为一些轿车的标准设置,全世界约有一半的轿车采用动力转向。随着汽车电子技术的发展,目前一些轿车已经使用电动助力转向系统(EPS),使汽车的经济性、动力性和机动性都有所提高。EPS利用电动机产生的动力协助驾车者进行动力转向, 一般是由转矩(转向)传感器、电子控制单元、电动机、减速器、机械转向器、以及蓄电池电源所构成。汽车在转向时,转矩(转向)传感器会感觉到转向盘的力矩和转动的方向,这些信号会通过数据总线发给电子控制单元,电控单元会根据传动力矩、拟转的方向等数据信号,向电动机控制器发出动作指令,从而电动机就会根据具体的需要输出相应大小的转动力矩,从而产生了助力转向。如果不转向,则本套系统就不工作,处于休眠状态。由于电动助力转向的工作特性,驾车者会觉得方向感更好,高速时更稳不发飘。又由于它不转向时不工作,而且只需电力不用液压,与传统动力转向系统在各种行驶条件下均可节能80%左右,提高了汽车的运行性能。在近年得到迅速的推广,也是今后助力转向系统的发展方向。
图1所示为一个典型的电动助力转向系统,其核心是一个电动机变频调速系统。由于永磁同步电动机(PMSM)具有结构简单、体积小、重量轻、损耗小、效率高等特点,和直流电机相比,它没有机械换向器和电刷、与异步电动机相比,它不需要无功励磁电流,因而功率因数高,体积小,电流和定子电阻损耗小,且转子参数可测、定转子气隙大、控制性能好,是汽车电动助力转向系统的首选。

永磁同步电动机的矢量控制一般通过检测或估计电机转子磁通的位置及幅值来控制定子电流或电压,这样,电机的转矩便只和磁通、电流有关,与直流电机的控制方法相似,可以得到很高的控制性能。对于永磁同步电机,转子磁通位置与转子机械位置相同,这样通过检测转子的实际位置就可以得知电机转子的磁通位置,从而使永磁同步电机的矢量控制比起异步电机的矢量控制有所简化。在要求高精度,高动态性能以及小体积的场合,应用PMSM电机伺服系统具有明显优势。本文即专门讨论一种用于EPS系统的PMSM电机伺服系统的设计。该系统使用XC164CM作为EPS系统的核心控制芯片,同时采用定子磁场定向原理(FOC)实现永磁同步电动机的伺服控制。实验结果证明,该系统设计合理,性能可靠,非常具有针对性。
XC164CM是目前广泛使用的C166系列单片机的一种新的派生型,是基于增强型 C166S V2结构的,优于现有的16位解决方案。XC164CM具有很强的 DSP性能和先进的中断处理,加上各种高效灵活的外设和高性能片上Flash,使得它成为工业和汽车应用设备控制的理想选择。其灵活的智能PWM单元CAPCOM6E提供交流电机(AC), 直流无刷电机(BLDC)和开关磁阻电机(SRM)等各类电机的PWM控制。而高速、高分辨和具有同步触发功能的ADC能快速和精确地转换复杂的模拟环境变量。具有自动网关功能的高速TwinCAN模块则能实现高效的网络化的方案。XC164CM封装为P-TQFP-100,框图如图2所示。

C166S V2与C166相比有不少优异之处。首先,它采用增强哈佛结构(程序存储器和数据存储器具有各自的多带宽总线)、具有单周期指令集, 在40MHz的CPU时钟时具备40MIPS的指令执行速度。其次, 它不仅有5级指令流水线, 还新增了2级预取指令流水线, 具有无可比拟的程序分支预测判断能力, 从而实现零周期程序跳转。它除了拥有高速硬件乘/除单元外, 还特别集成了单周期乘加器(MAC)单元, 从而具有强劲的DSP功能(含DSP指令集), 使得其运算能力大为提高。配套的DSP函数库能使用户快捷方便地实现各种DSP运算如FIR, IIR, FFT, 等等。C166S V2 还集成了带JTAG接口的片上调试系统(OCDS) 。
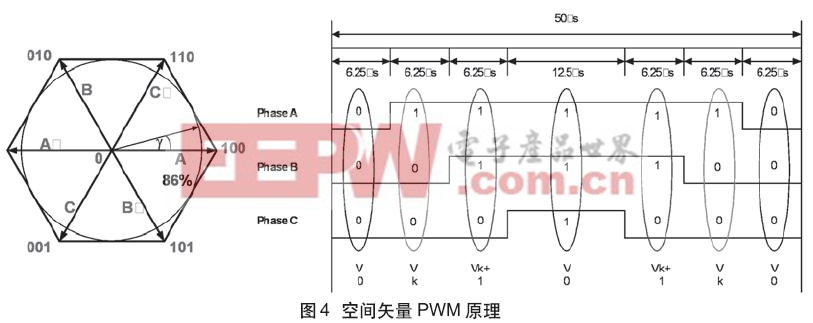
XC164CM 的智能PWM单元CAPCOM6E如图3所示。它能产生各种类型的PWM波形, 如SPWM, 空间矢量PWM (SVPWM)等。本系统使用SVPWM, 其产生原理如图4所示。8种可能的开关状态形成6种可能的磁场方向(加上两个零矢量), 磁场矢量可以达到六边形(逆变器的运行区域)内的所有点, 而不能超出该六边形。PWM开关频率为20KHz。
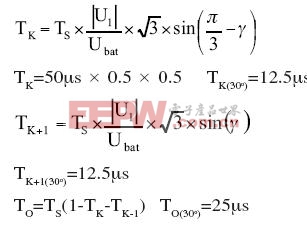
其时间计算公式(30o)为:

磁场定向(FOC) 控制及其实现
为建立永磁同步电动机的转子轴(d, q轴)数学模型,作如下假定:
・忽略电机铁心的饱和;
・不计电机的涡流和磁滞损耗;
・转子没有阻尼绕组。
在上述假定下,以转子参考坐标(轴)表示的电机电压方程如下:
定子电压方程

式中:ud,uq为d,q轴电压; id,iq为d,q轴电流;Ld,Lq为定子电感在d,q轴下的等效电感; Rs为定子电阻; we为转子电角速度; yf为转子励磁磁场链过定子绕组的磁链; p为微分算子; Pn为电机极对数; wm为转子机械转速; J为转动惯量; TL为负载转矩。
上述方程是通过a,b,c坐标系到d,q转子坐标系的变换得到的。这里取转子轴为d轴,q轴顺着旋转方向超前d轴90o电角度。其坐标变换如下:
克拉克(CLARKE)变换
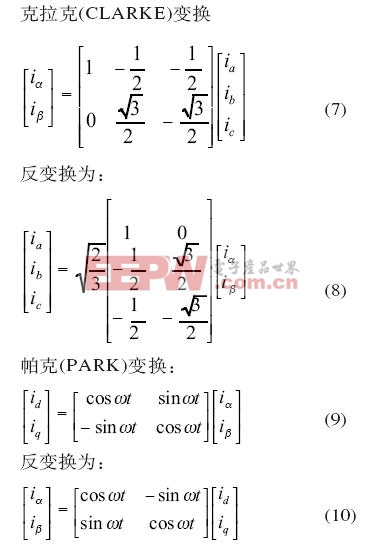
从转子坐标来看,对于定子电流可以分为两部分,即力矩电流iq和励磁电流id。因此,矢量控制中通常使id=0来保证用最小的电流幅值得到最大的输出转矩。此时,式(5)的电机转矩表达式为
由式(11)看出,Pn及yf都是电机内部参数,其值恒定,为获得恒定的力矩输出,只要控制iq为定值。从上面d, q轴的分析可知,iq的方向可以通过检测转子轴来确定。从而使永磁同步电机的矢量控制大大简化。整个PMSM电机的磁场定向控制(FOC)如图5所示。


评论