使用基于模型的设计开发侧翻稳定性控制系统

汽车电子领域内整合主动安全机制的趋势愈演愈烈,迫使汽车制造厂商将防侧翻功能整合到传统汽车底盘控制系统之中,例如,制动防抱死系统和牵引力控制系统如今均已得到增强,整合了防侧翻功能。美国国家公路交通安全管理局(NHTSA)进一步推进了这种趋势,强制要求所有 2011 年款汽车和更新的款式必须配备防侧翻控制器。这项要求以 NHTSA 对于侧翻碰撞的事故数据分析为依据。例如,根据 NHTSA 的国家统计与分析中心提供的数据,在 2001 年,共有 10,138 人死于侧翻碰撞事故,占当年因事故死亡总人数的 32%。实施主动安全机制可降低车辆侧翻的风险,从而减少潜在伤亡。降低侧翻风险的方法之一就是实现电子稳定性控制(ESC),根据测量和预计的车辆状态来应用差动制动。本文主要介绍使用基于模型的设计,为运动型多功能车(SUV)开发和自动优化 ESC。
汽车和控制器模型
在基于模型的设计中,核心概念是可执行的规范或模型,它描述了系统的动态行为。可以利用经过验证的汽车模型(本例中为高保真度的 SUV 模型),显著降低与控制器设计相关的开发成本和时间。可利用模型的数字仿真来研究车辆对不同转向操控实验的反应,并且此类测试可轻而易举地在不同的路面、轮胎型号和车辆属性等参数下重复执行。此外,还可以在嵌入式控制系统的开发与验证中使用模型。
本文所用的汽车是典型的中型 SUV。车辆模型可在 CarSim® 中找到,这是一款现成的商业汽车动态仿真工具。车辆模型的性能根据测试数据进行验证,适合仿真车辆在严重侧倾运动下的反应。车辆模型具有两个独立前端悬架、一个用于支持簧载质量的实心后轴。非线性数学模型可为簧载质量、各轴、各轮、转向系统和制动系统提供自由度。车辆模型可使用不同的车辆参数以及路面和环境条件进行自定义。
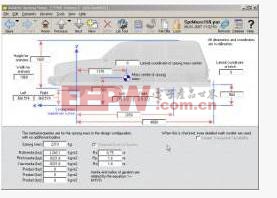
图 1:使用 CarSim 用户界面设置车辆参数。
图 1 显示了 CarSim 用户界面,以及用于构建车辆模型的部分物理车辆参数。可从控制器参数中分别修改这些参数,以便测试控制器在不同车辆条件下的行为,例如,一名乘客、多名乘客和高重心的情况。本文所用的车辆模型应用的转向输入符合 NHTSA fishhook 操控实验,这种标准实验用于评估动态车辆稳定性。本测试的设计目的是模拟驾驶员在避开路面上突然出现的障碍物时可能采取的行动。对于数字仿真,我们为 SUV 模型设定转向输入,验证了在没有 ESC 的情况下,车辆将出现侧翻。
控制器开发与优化
本文中所实现的 ESC 避免了驾驶员的操作导致的不安全车体侧倾和侧滑动作。它能对车轮应用差动制动,从而调整车体侧倾和侧滑率,同时最小化由控制器自动应用的电子制动所导致的车辆速度降低。 我们实现的 ESC 在三种控制模式之间切换。根据车辆进入车轮滑移状态的三种可能诱因激活控制模式:失去牵引力、侧倾过度、侧滑过度。模式切换逻辑控制一组比例-积分-微分(PID)补偿器,它们将根据已测量和预计的参数调整驾驶员对车轮施加的制动压力。Simulink® 中实现的控制器设计具有六项 PID 增益,可为优化 ESC 性能而进行更改。
在此模型中,我们可以查看车轮转速、制动压力、车体侧倾、侧滑率和滑移率。某些车辆状态是通过可用传感器数据预测的,就像在实际车辆控制器中一样,而其他一些状态是通过已测量和预计参数之间的数学关系预测的。车辆速度是通过未制动车轮的车轮平均转速预测得出的。使用低通滤波器来模拟在已测量的车轮转速下车辆惯性的效果,避免在向四个车轮应用制动压力时,车速测量值出现不确定值。
如果不使用造价高昂的传感器,车体滑移率将是一个难以直接测量的参数。我们实现的 ESC 将通过已测量的侧滑率来预测车体滑移率。车体侧倾角是通过将横向加速度与车体侧倾角相关联的传递函数预测的。在车体侧倾角处于指定设计限制内时,这个传递函数是有效的。通过确保优化算法将在预测的车体侧倾角超出设计限制时对控制器施以严格作用,即可展示出,我们并不需要能准确预测超出设计范围的车体侧倾角的预估算法。因而,我们可以显著简化普通车辆操作条件下的车体侧倾角预估算法。

pid控制器相关文章:pid控制器原理




评论