CAN总线在混和动力汽车电机控制系统中的应用
2 CAN控制器
TMS320F241是美国TI公司TMS320系列定点数字信号处理器产品之一,专为数字电机控制而设计,其指令执行速度是20MIPS,几乎所有指令都可以在一个50ns的单周期内执行完毕。同时TMS320F241芯片内嵌了CAN模块,因此该芯片是设计基于CAN总线的数字式电机控制系统的优选芯片。TMS320F241的CAN模块是FullCAN控制器,包括报文处理器(负责接收和发送管理以及帧存储),需要的CPU开销比 BasicCAN控制器少,并且适应技术规范CAN2.0B,因此可以发送和接收标准帧(11-bit标识符)和扩展帧(29-bit标识符)。同时,CAN模式包括6个信箱(Mailbox)以及15个不同的16-bit寄存器,这些寄存器分别是控制寄存器、状态寄存器、中断寄存器和接收屏蔽寄存器。
3 CAN总线在HEV电机控制系统中的应用
3.1 硬件设计
TMS320F241 芯片与CAN总线接口的总线收发器采用Philips公司的PCA82C250芯片。82C250可以提供对CAN总线的差动发送能力及对CAN控制器的差动接收能力。通信介质采用双绞线,信号差动发送和差动接收的最高通信速率可达1Mbps。为了增强抗干扰能力,在TMS320F241与82C250之间采用高速光耦6N137进行隔离。
TMS320F241与CAN总线的接口电路如图1所示。
3.2 帧结构
电机控制单元(MCU)与整车控制单元(VCU)之间的报文传送由两种类型的帧表示和控制:数据帧携带数据由发送器到接收器;远程帧通过总线单元发送,以请求发送具有相同标识符的数据帧。数据帧和远程帧借助帧空间与当前帧分开。
3.2.1 数据帧
CAN 技术规范2.0B中存在两种不同的帧格式,其主要区别在于标识符的长度,具有11位标识符的帧称为标准帖,而29位标识符的帧称为扩展帧。本系统中数据帧采用标准帖。数据帧由7个不同的位段组成,包括帧起始(SOF)、仲裁段、控制段、数据段、循环冗余检查段(CRC)、应答段(ACK)以及帧结束(EOF)。其中仲裁段由标识符和远程发送请求位(RTR)组成;控制段由数据长度码(DLC)和两个保留位r0、r1组成;数据段由数据帧中被发送的数据组成,它包括0~8个字节,每个字节8位。
VCU向MCU发送的数据帧包括:MCU初始化、检测MCU、VCU发生不可恢复错误、VCU的工作状态、控制电机转速、控制电机转矩、请求返回电机的错误状态等请求或命令。
MCU向VCU发送的数据帧包括:返回MCU当前状态、送回电机转速、送回电机转矩、电机或MCU出错、电机工作正常等信息。
为了区别VCU发出的不同请求和命令,采用了Universal Serial No字节。该字节位于数据段的首字节,表示请求或命令和编号。
3.2.2 远程帧
远程帧与数据帧的结构相同,只是不包括数据段。远程帧的远程请求发送位为1。远程帧用于请求信息。TMS320F241的CAN模块可以自动回复远程帖,即节点收到远程帧。如果该节点中有和远程帧的标识符相同的报文,则该节点就将相应的数据帧发送到总线上。本系统中远程帧和数据帧一样,采用标准格式。
VCU的MCU发送的远程帧包括:请求返回电机状态、请求返回电机转速、请求返回电机转矩等。
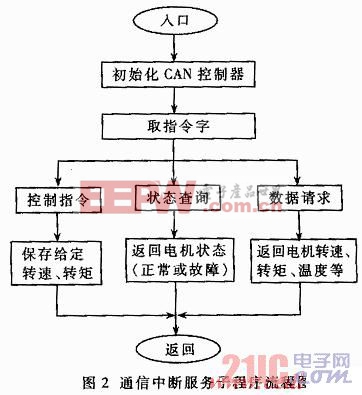
3.3 通信中断服务程序
VCU的指令通过CAN部到达MCU之后,采用中断的形式(如IRQ5),使MCU转入通信中断服务子程序。以保证VCU的指令可以及时发送到MCU。通信中断服务子程序流程图如图2所示。










评论