简要介绍汽车控制系统

随着汽车技术和电子技术的迅速发展,现代汽车为提高汽车动力性、经济性、安全性、舒适性,以及减少尾气排放污染而广泛采用了汽车控制技术.汽车性控制系统,包括汽车防抱死制动系统(ABS)、汽车驱动防滑转系统(ASR)、汽车电子稳定程序(ESP)、电子感应制动控制系统(SBC)、电子制动力分配(EBD)、辅助制动系统(BAS)、安全气囊(SRS)和汽车雷达防碰撞系统;汽车变速系统的电子控制,包括电控自动变速器(EAT)和无级变速器(CVT);电控自动空调(A/C);巡航控制系统(CCS);电子控制悬架(ECS);电控动力转向系统(EPS);中央门锁与防盗报警系统;车载网络技术;其他电子控制装置,包括汽车电子仪表、汽车导航系统、汽车音响系统、汽车行驶记录仪和轮胎压力监测系统的组成、控制原理,以及汽车电控系统的故障诊断与检修等内容。
本文引用地址:https://www.eepw.com.cn/article/196436.htm下面我们来详细介绍一下汽车控制技术中的汽车自动控制技术。
为了使汽车控制系统达到车速控制的要求,在单片机实时控制系统总体方案确定后,控制方案的选择非常关键,目前用于汽车巡航控制的控制方案主要有PID控制、模糊控制、迭代学习控制、自适应控制等,它们都有各自的特点。
1.PID控制
PID控制,即比例一积分一微分控制,根据实际车速与设定车速的偏差,实现汽车不变参数的巡航控制。
在汽车行驶过程中,驾驶员设定一个车速给汽车控制系统,同时车速传感器测得的实际车速也输入控制器,产生实际车速和设定车速的偏差(设为△v),控制器的比例部分根据偏差的大小输出相应的控制量,以控制节气门的开度,使车速迅速趋近设定车速。考虑到偏差一直存在,控制器的积分部分就把偏差积累起来加大控制量,以消灭偏差,使车速保持恒定,而微分部分则起预估作用。当△v>0时,表示偏差在加大,就及时增加控制量,使△v减小;当△v0 时,表示偏差在减小,则减小控制量,以避免△v趋近于零时,又向反方向发展而引起振荡。
PID控制具有结构简单、参数整定方便的优点,在许多场合下都能获得令人满意的控制效果。但是由于被控对象的特性比较复杂,具有非线性或时变的过程,应用常规PID控制,若参数调整不当,会使系统不停地振荡,控制效果不甚理想。有关PID的算法将在后续章节中详细介绍。
2.模糊控制
模糊控制是一种模仿人工控制活动中人脑的控制策略,运用模糊数学把人工控制策略用计算机实现,它是近几年发展起来的一种新型的汽车控制技术。司机对汽车的控制,从本质上来说是一个模糊控制的过程。驾驶员驾驶汽车时,根据目标车速与实际车速之间的偏差及路面情况,利用自己的经验,决定加速踏板的变化量,从而使汽车趋近于目标车速。模仿这一过程的模糊控制原理框图如图2所示。用于汽车巡航控制的模糊控制器的输入量一般可选择设定车速与实际车速的偏差以及偏差的变化率。
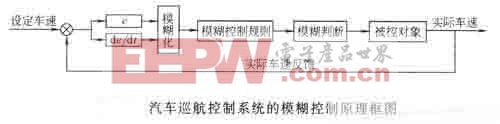
模糊控制不依赖系统的精确数学模型,因而对系统的参数变化不敏感,其不足之处是模糊控制规则的获取和模糊隶属函数形状的确定是一项费力的工作,而且系统一旦确定,其规则和隶属函数就确定而不能随外界和车辆参数变化进行调整。
3.迭代学习控制
因为汽车巡航行驶中存在着严重的非线性和不确定性,特别是巡航控制参数在不同车速下其值是不确定的,并且运动载体对控制的实时性要求较高,所以有人将迭代学习算法应用到了汽车控制系统中。基于迭代学习技术的汽车巡航控制原理如图3所示。利用实际车速与设定车速的偏差,通过多次的迭代计算得出一个修正量,进一步修正控制器输出的控制量,从而使实际车速更趋近于设定车速。
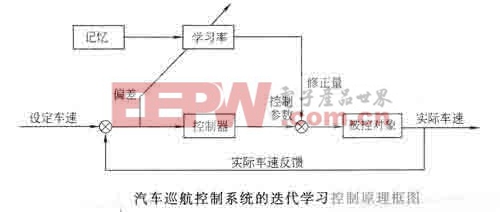
迭代学习控制可以对参数是未知的但是变化的或不变的系统实施有效控制。相对于其他控制技术,迭代学习控制的适应性更广,实时性更强。但其算法复杂,计算机编程困难。
4.自适应控制
由于汽车自动控制系统是一个本质非线性系统,并且汽车在行驶过程中受到路面坡度、空气阻力等外界干扰,因而基于时不变系统得到的控制方法就难以在各种工况下取得良好的效果,解决的办法是加入自适应环节,其控制方法能随各种因素的变化而实时地加以调整,以适应复杂多变的行驶工况。
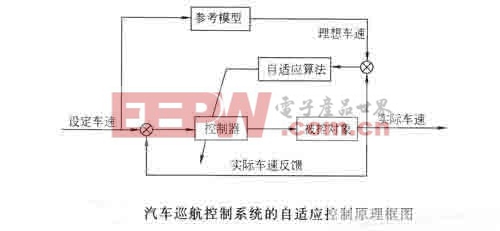
自适应控制是针对具有一定不确定性的系统而设计的。自适应控制方法可以自动监测系统的参数变化,从而时刻保持系统的性能指标为最优。目前用于汽车巡航控制的自适应控制主要为模型参考自适应控制。基于自适应控制的汽车巡航控制原理如图4所示。设定车速同时加到控制器和参考模型上,由于参考模型的理想车速和实际车速不一致,产生偏差,自适应机构检测到这一偏差后,经过一定的运算产生适当的调整信号改变控制器参数,从而使实际车速迅速趋近于理想车速,当偏差趋于零时,自适应调整过程就停止,控制参数也就调整完毕。当汽车在行驶过程中遇到上下坡或是由于风力而使车速发生变化时,系统也如上述过程一样,对控制器参数进行调整。
鉴于自适应控制的上述特点,自适应控制非常适合像汽车这样的一类非线性系统的控制。在控制过程中,系统能够自动调整控制参数,使得控制效果更好。

cvt相关文章:cvt原理
评论