基于CPLD的开放式四轴运动控制器的设计
1、系统硬件结构
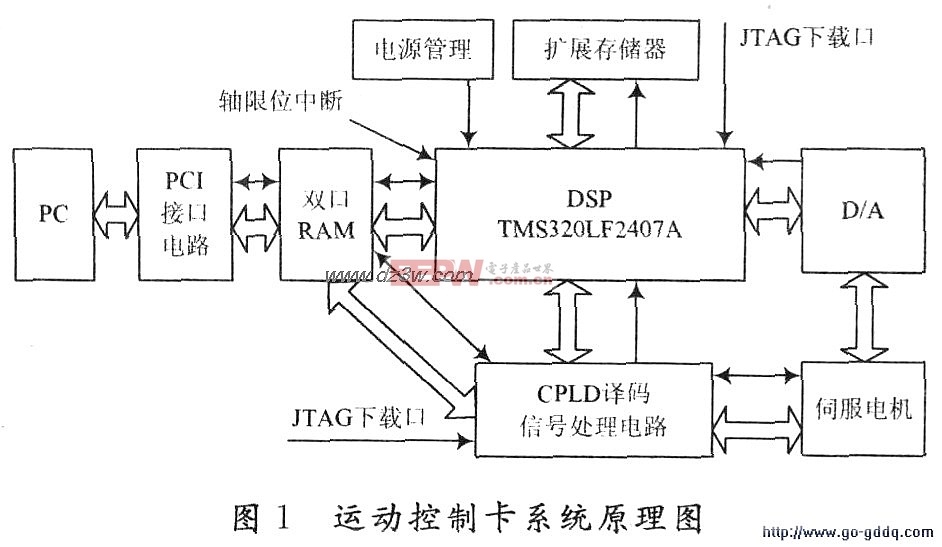
开放式四轴运动控制器的硬件结构如图1所示。其中,虚线框内的部分由ALTERA公司的复杂可编程门阵列EPF6016实现。FLEX6000系列器件EPF6016是ALTERA公司为大容量设计提供的一种低成本可编程交织式门阵列,共有16000个可用门,1320个逻辑单元,117个I/O引脚,每个I/O引脚都有独立的三态输出使能控制。该器件采用OPEFLEX结构,能在最小的芯片尺寸上保持高性能和高布线率。器件的基本组成是逻辑单元(LE)。每个逻辑单元由一个4输入查找表、一个寄存器以及作为进位链和级连链功能的专用通道。每十个逻辑单元组成一个逻辑阵列块(LAB)。器件采用SRAM构造,可以通过外部EEPROM或控制器实现在线配置,能使设计者在设计初期以及设计测试过程中对设计作灵活的修改,同时也能够通过在线重新配置来改变其内部功能。运动控制器的硬件功能编程由ALTERA公司提供的MAX+PLUSII开发系统支持,设计采用了原理图输入方式,设计和调试比较直观、简便。本文引用地址:http://www.eepw.com.cn/article/191937.htm
该运动控制器的硬件结构分为以下几部分:
(1)主机接口电路:运动控制器采用了ISA-AT总线接口,同时设计了PC-104接口。数据总线宽度为16位,接口功能在EPF6016内部实现,其中包括总线地址译码、数据和命令锁存、中断及复位等功能。
(2)光电编码器接口电路:运动控制器接收四路光电编码器差分输入信号作为位置反馈,最高输入频率为1MHz,输入的A、B相信号经过差动接收后,在EPF6016内部经过数字滤处理后进行倍频和辨向,产生的方向信号和脉冲信号进入16位加减计数器。系统软件可以计数而获得实际的位置变化。
(3)模拟量输出电路:高性能的运动控制器应采用高分辨率的D/A转换器。为了保证模拟量控制信号的精度,并考虑到模拟量信号在线上传输引起的漂移和电压降落,运动控制器和伺服驱动器之间的模拟控制接口信号至少应有12位以上的精度。本文中的运动控制器采用了低成本、小封装体积的双16位串行输入D/A转换器AD1866,构成双极性电压输出方式。在EPF6016内部设计了控制4路并发式并行/串行数据转换以及4路D/A地址选择电路,运动控制器的模拟量电压输出范围为±10V。
(4)数字量输入输出电路:运动控制的所有I/O信号均采用光电隔离处理,考虑到I/O并关信号可能产生的信号抖动现象,对每一路I/O信号都进行了相应的数字滤波处理以消除噪声信号。控制器设计了40路I/O信号,其中包括16路专用输入信号、2中特殊开关输入信号(用于坐标测量或定位的接触式测头信号和急停开关信号),另外还设计了16路可编程通用I/O信号(8路输入/8路输出)。实际上,所有的I/O信号除个别信号具有独特的功能外,都是开放的,可以根据I/O信号除个别信号具有独特功能外,都是开放的,可以根据应用的特点设计具体的功能。












评论