基于CPLD的开放式四轴运动控制器的设计
(5)模拟量输入电路:对于一些控制场合,需要检测或控制外部状态量的变化,运动控制器也设计了相应的单端或差动式模拟量反馈输入通道。系统采用MAXIM公司的8通道、12位转换精度、150kHz采样频率的A/D转换器MAX197。各模拟量通道可以独立编程选择输入范围:±10V、±5V、0~10V、0~5V,A/D转换器的转换基准采用内部基准。
(6)可编程定时器:由于在开放式运动控制系统中,插被运算和伺服控制都由PC机完成,这两个控制任务通常不在一个任务循环中处理。一般而言,插补运算的周期要比伺服控制的周期长,因此两个任务需要占用不同的系统资源。由于插补运算通常占用PC机的定时中断资源,而伺服控制也是一个需要精确定时的任务,因此在EPF6016内部设计了可编程16位定时器。该定时器可采用不同的时钟源,定时范围为0~300ms,最小分辨率为70ns,定时器产生的溢出动作可以向PC机申请中断。
(7)同步工作电路:在运动控制系统中,各控制轴同步运行是一个很重要的要求,因此在EPF6016内部设计了同步控制电路的和专门的控制字,支持多块运动控制器控制输出同步刷新、反馈计数值同步读取等操作。
(8)硬件看门狗电路:在运动控制器中采用了DALLAS公司的看门狗复位及电压监控芯片DS1232,以监测系统的软硬件运行情况。当系统软件运行死机的时候,看门狗电路产生信号复位系统,保证整个系统的可靠性。看门狗定时时间可以编程设置为300ms、600ms、1.2s。
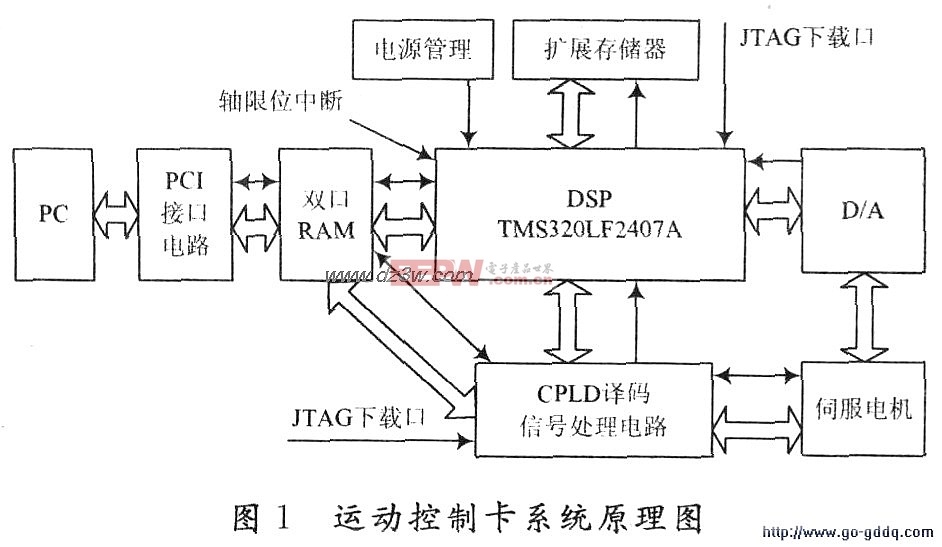
从硬件结构的组成特点可以看出,系统的组成核心是其有可重新配置特点的CPLD
EPF6016,它实现了几乎所有外围电路管理功能,而其它的电路都属于标准的辅助电路。因此系统在结构上具有典型的开放性,这对实现软件的开放是一个很好的支持。本文引用地址:http://www.eepw.com.cn/article/191937.htm
2、运动控制器软件设计
运动控制器的软件采用Borland
C++语言编写,可以按照库函数的方式调用。根据实时运动控制的特点硬件资源的结构,函数库分为两类:
(1)控制运动控制器硬件操作的函数库。包括针对运动控制器硬件基本操作的函数,通过调用这些函数可以充分利用硬件资源,实现定制的应用。运动控制器上的各个硬件功能的存取操作是通过一组读写控制命令实现的,每一个控制命令占用一个PC机I/O空间地址,对每一个地址分别进行读或写操作将产生不同的功能。硬件操作函数库按照C++语言类的方式构造,每个命令都是以运动控制器硬件操作类的公有成员函数形式存在。这些命令主要实现以下功能:
①控制光电编码器脉冲计数器,读取或清除计数值;
②设置运动控制器的工作方式以及配置系统的各个硬件资源;
③开关量输入输出操作,实现包括通用I/O和专用I/O的查询和设置、控制器硬件资源工作状态查询等功能;
④模拟量控制命令,用于控制D/A转换器和A/D转换器实现模拟量输出和模拟信号采集等。












评论