基于LPC2148的步进电机调速和测速系统设计

步进电机的调速和测速系统一般都采用ARM作为控制器,外加分立的数字逻辑电路和模拟电路构成。该系统以LPC2148作为控制核心,合理选择电动机的频率控制和闭环反馈控制,实时检测和调整电机的转速,使系统既具有良好的稳态性能,又具有良好的动态性能。
1 系统的工作原理
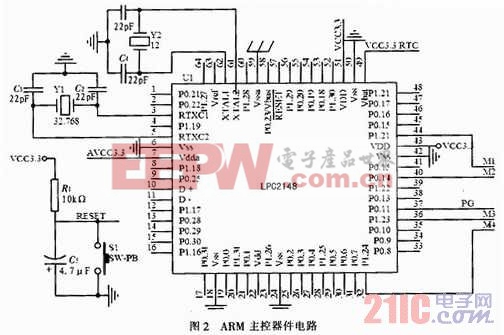
该系统主要由基于LPC2148为核心的主控电路连接电机驱动电路、通信模块电路(RS232)、测速电路(霍尔传感器)、A/D转换电路等其他电路组成,如图l所示。图2为ARM主控芯片。LPC2148为核心的主控电路负责频率输出,通过改变频率的大小来控制电机的转速,采集电路采集的数据可以通过RS-232接口电路与PC机实现通信。同时LPC2148模块将采集到的数据进行处理,根据偏差值进一步修正频率控制信号的输出。

2 硬件设计
2.1 调速模块设计
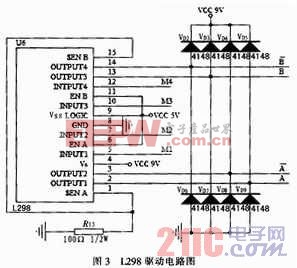
该系统对步进电机进行调速通过调整频率的方法。步进电机转速=f×60/200x,其中x是细分倍数,细分驱动方式下,由于步距角小,步进电机的控制精度明显提高,同时这种驱动方式又可有效抑制低速运行中产生的噪声和振荡现象。步进电机采用1.8°的二相四拍式,200个步进脉冲可以转一圈。其步进动作时受ARM控制,电机专用驱动器L298对步进电机进行驱动,驱动电路如图3所示。L298内部包含4通道逻辑驱动电路,是一种二相和四相电机的专用驱动器。即内含2个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46 V、2 A以下的电机。ARM主控制器是通过右端的控制口![]() 接入,而M1~M4这4个端口用于连接电机,通过右端输入脉冲信号的变化对其控制。
接入,而M1~M4这4个端口用于连接电机,通过右端输入脉冲信号的变化对其控制。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理





评论