一种四自由度码垛机器人机构和运动分析

1 前言
本文引用地址:https://www.eepw.com.cn/article/185543.htm随着物流、食品和石化等行业的不断发展,码垛机器人发挥着越来越重要的作用,它不仅可以准确、高效地完成码垛作业,而且可以降低工人的劳动强度,提高生产效率。
目前,国外主要机器人厂家,如ABB、FANUC等,均有较为完善的码垛机器人产品系列,垄断了国内外市场;而国内,码垛机器人的研究起步不久,还未有成熟的,产业化的码垛机器人产品出现。本文研究了ER300码垛机器人结构特点及运动空间,展现了一般码垛机器人与六自由度机器人的结构差异和运动空间形成方式。
2 码垛机器人机构分析
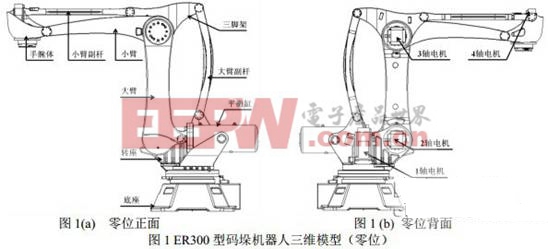
基于码垛任务的实际需要,码垛机器人通常具有四自由度。与一般垂直型六自由度串联工业机器人的结构不同,码垛机器人通过在肩部串联两个平行四边形结构使得腕关节旋转轴始终与地面垂直,从而使被抓持物始终处于水平状态;腕部结构简单,没有复杂的姿态调整结构。目前,码垛机器人使用较为广泛的结构之一,如图1所示:
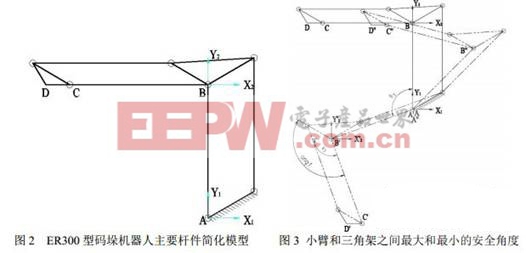
将图1中三维模型进一步简化为杆件连接(略去了1轴和平衡缸),如图2所示,A点为机器人2轴,B点为复合铰链,通过三角架分别与大臂和大臂副杆,与小臂和小臂副杆组成串联的平行四边形结构,使得运动过程中手腕体回转轴始终与地面保持垂直,从而手腕体中心D点相对小臂末端C点位置也保持不变。
此外,ER300机器人采用了将3轴电机和减速器均固定在三角架上的安装方式。该种连接方式使得三角架和大臂副杆承受了小臂、手腕体和负载等组件关于3轴的转矩M,但小臂不与大臂耦合旋转,在很大程度上简化机器人的运动方式和控制方法。
鉴于ER300码垛机器人没有复杂的耦合运动,本文不采用传统的D-H方法进行计算。为研究计算D点运动可达空间,这里将全局坐标系原点O0固定在1轴与地面的交点处,Y0与1轴重合,其余局部坐标系如图2所示
在全局坐标系中,各关节点坐标与关节旋转角之间的换算关系如下:
其中,R、H分别为1轴回转半径和底座高度;L2、L3分别为大臂和小臂长度;、分别为大臂相对Y1轴旋转角度,小臂相对X2轴旋转角度,本文规定逆时针旋转为正向;S为长。
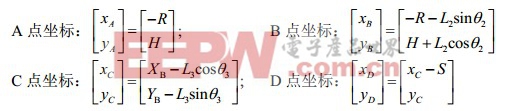
零位时,2轴和3轴的旋转范围分别,.为保护码垛机器人末端平行四边形结构,防止杆件间发生干涉,ER300为小臂与三角架之间设定的安全角度为(如图3所示)。因此,小臂旋转角范围与大臂旋转角函数关系为:
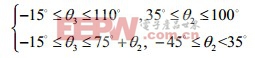
图3展现了在2轴两个极限位置时,小臂与三角架之间的最大和最小的安全角度。



评论