数字控制全桥软开关电源的Saber仿真分析

数字化是开关电源的发展趋势,它可以实现快速、灵活的控制设计,改善电路的瞬态响应性能,使之速度更快、精度更高,可靠性更强。因此,本文基于Saber仿真软件对采用数字控制的大功率移相控制全桥ZVS电源系统( 12 V /5 000 A)进行了建模、仿真,并对仿真结果进行了分析。
本文引用地址:https://www.eepw.com.cn/article/177796.htm1 主电路的建模
移相控制全桥ZVS2PWM变换器电路实现简单、工作可靠,而且充分利用了器件的寄生参数,不需要加入辅助电路,比较适合大功率低压大电流的应用场合,其主电路结构如图1所示。
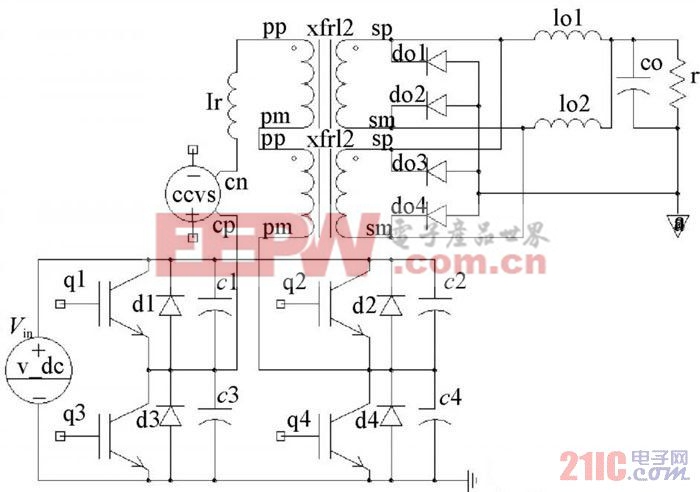
图1 移相控制全桥ZVS2PWM电源系统主电路
Saber软件提供了功率器件建模工具Model Ar2chitect,如图2所示为该工具提供的IGBT等效电路模型,根据实际器件的参数调整图2中的各个参数值即可完成建模。本系统采用IGBT 的型号为CM400HA-24E,其额定参数为1 200 V /400 A.电容c1~c4为外接谐振电容,其中c1 = c3, c2 = c4。
高频变压器采用两个单元变压器串并联的组合方式,它可以使并联的输出整流二极管之间实现自动均流,并且使得变压器的设计模块化,简化变压器的制作工艺,降低损耗。原边用串联电感lr作为变压器的等效漏感, 用电流控制电压源(CCVS)模块来代替具有电流采样作用的霍尔电流传感器。
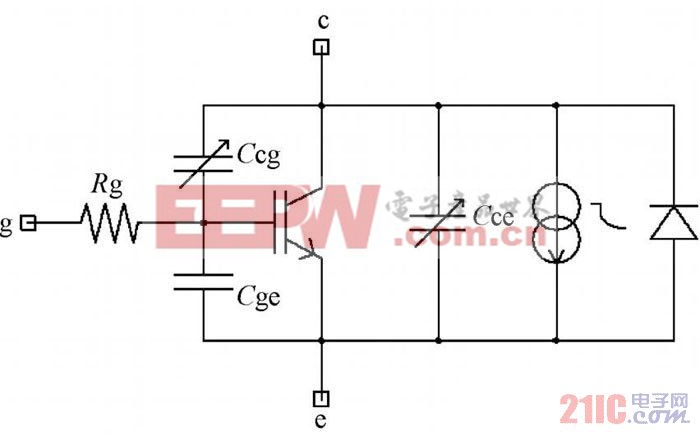
图2 IGBT等效结构图
次级输出采用倍流整流电路结构,该结构中电感电流和变压器次级电流小,整流管导通损耗及变压器铜损较小;该结构具有双电感交错滤波,可在电感值较小的前提下,减小电流纹波,提高动态响应性能。
2 数字控制器的建模
2.1 峰值电流型控制方式
开关电源功率开关器件导通电流等内部变量的瞬态值具有相对独立性,只有直接控制电流瞬态峰值,才能有效快速地保护功率开关器件,同时克服全桥变换器的偏磁问题,提高其动态反应速度和可靠性,因此,本系统采用峰值电流控制模式。峰值电流型控制模式开关电源的系统结构图见图3所示,系统控制数学模型见图4所示。
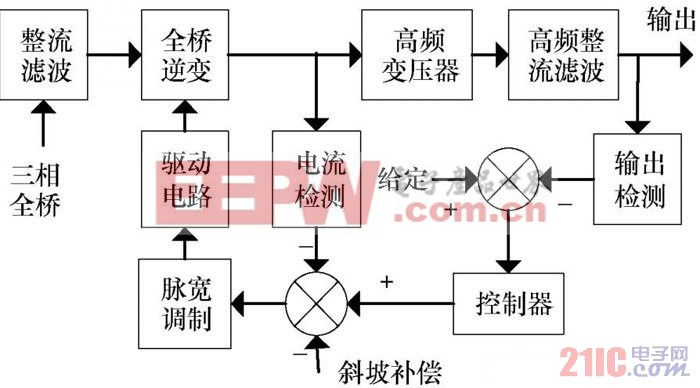
图3 开关电源系统结构图
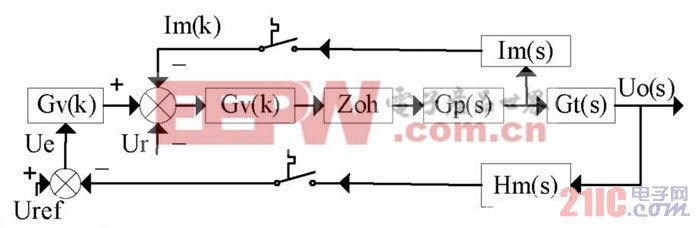
图4 系统控制数学模型
2.2 P I调节器建模
P I调节是控制系统中最成熟,应用范围最广的一种调节方式,离散型P I控制器表达式为:
采用峰值电流模式控制的系统,当占空比大于0. 5时,会产生不稳定现象,采用斜坡补偿可以改善系统性能,增加系统稳定性。依据其他资料,在控制工程实践中,斜坡补偿电压的上升率一般设计为输出电感电流检测信号下降率折算值的70%~80%.
式(1)中: k为采样序号; U ( k)为第K次采样时P I调节器输出的偏移量; Kp 为P I调节器的比例系数;T为采样周期; Ti 为PI调节器积分时间; E ( k)为第k次采样的偏差值。由式(1)可推出其离散P I增量式为:

式(2)中:U ( k - 1)为第k - 1次采样时PI调节器输出的偏移量; E ( k - 1)为第k - 1次采样的偏差值;Ki 为P I调节器的积分参数。
P I调节器模型见图5所示,其实现过程为:

AD电压采样环节由一个模数转换接口a2z实现,采样值为Z0 ( k ) , 电压基准Zref由给定信号模块zdata提供,两者的差值为误差项E ( k) ;利用放大模块zamp将偏差值E ( k)放大积分系数Ki 倍,可得积分修正量ΔI ( k) ;将偏差值E ( k)通过减法模块zsub减去由延迟模块zdelay所保持的第k - 1次的偏差值E ( k - 1) ,再用放大模块将上述差值放大比例参数Kp 倍,可得比例矫正值为ΔP ( k) ;最后由加法模块zadd将积分修正量ΔI ( k) ,比例修正量ΔP ( k) ,以及由延迟模块所保持的第k - 1 次结果U ( k - 1)相加可得第K次采样结果U ( k)。
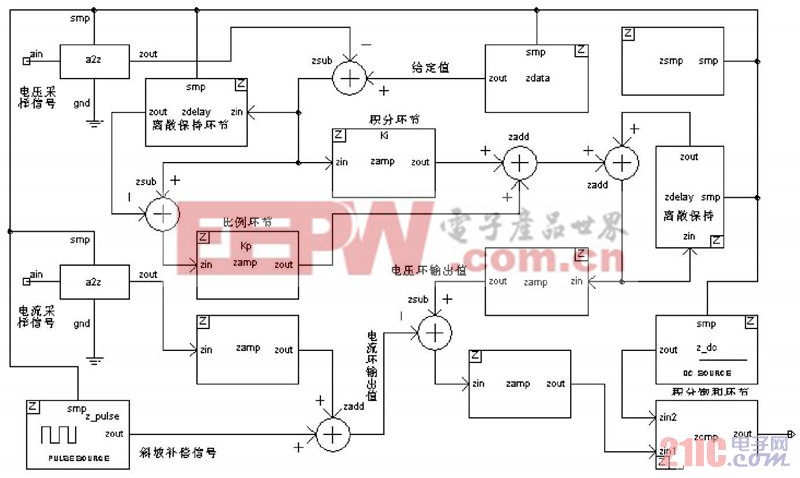
图5峰值电流型控制原理图
电流环控制采用P调节,其实现过程为:霍尔电流传感器采样之后,由模数转换接口将采样值转换为离散信号,经过一定倍数的放大之后,进行斜坡补偿。斜坡补偿环节由z_pulse模块依据前述补偿法则产生一定频率一定斜率的三角波实现。
经过斜坡补偿的电流信号与电压P I调节产生的结果相比较得到最终的误差调整值,最后由比较模块zcmp构成饱和环节,用于防止输出的移相值超出所能达到的移相范围。
2.3 移相全桥PWM 波形调制
Saber和Simulink之间可以实现协同仿真,这样可以发挥Simulink在软件算法方面的优势,通过自定义S函数产生移相PWM信号。以Saber为主机,调用Simulink,两者以固定时间步长交换数据。
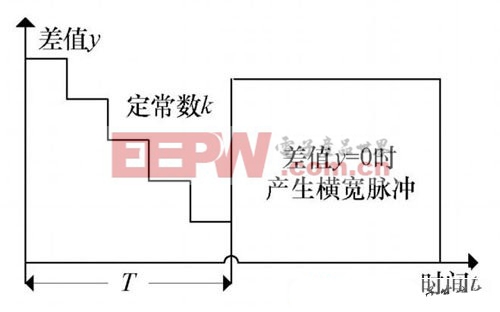
图6所示为移相PWM脉冲实现原理图。其主要原理为:当所对应的前驱动波形跳变为高时,由数字P I控制器得出的移相值U ( k)在远小于周期的定时间减去一定常数k,当差值为零时产生一对与所对应前桥臂驱动等宽的脉冲波,图中所示t即为移相时间。








评论