基于80C196KC的广播短波发射机马达控制系统设计

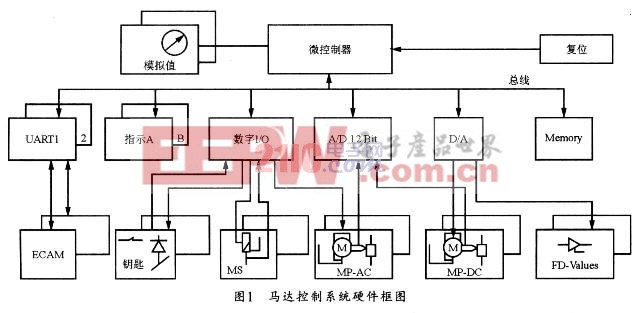
1.1 微控制器
本系统中的微控制器采用Intel80C196KC芯片,其工作频率为12 MHz。芯片内置的lO位模拟/数字转换器的模拟输入可用于测量相关调谐数据,如输出功率(Pfwd)、射频末级屏压(VAV2)和射频末级栅流(IGIV2)等。微控制器的地址范围是64 k字节,可外接四片EPROM和一片RAM(用“Memory”表示)。两片EPROM可用于存储监控程序,另外两片EPROM用于存储用户程序,一片RAM则作为用户数据区来存储中间数据。在硬件复位后开始启动时MAP为零,处理器从2080H地址处开始启动监控程序。若已装了用户程序EPROM,程序则跳至1D xxH.并将MAP设为1(2000H ……27FFH应为用户程序),同时用户程序由2080H开始执行。
1.2 A/D、D/A及数字I/O电路
与交流和直流马达齿轮机械连接的多圈电位器给出的马达绝对位置的反馈信号可作为模拟信号输入到马达控制板,然后通过一个12位的模/数转换器进行数字化处理后,便可输入给微处理器作为马达的位置控制信号。
微处理器输出的马达控制信息(运转方向、位置、速度等)可通过一个10位D/A转换器转换成模拟信号后传给马达装置。交流马达的控制指令分别为前进、后退、停止,它们与马达控制器的数字输出端口相连;直流马达由与所需速度成比例的电压进行驱动。同型转换器也可用来为不同的测量元件产生校准信号。










评论