教你用电子元器件DIY一个可以爬墙的简单机器人

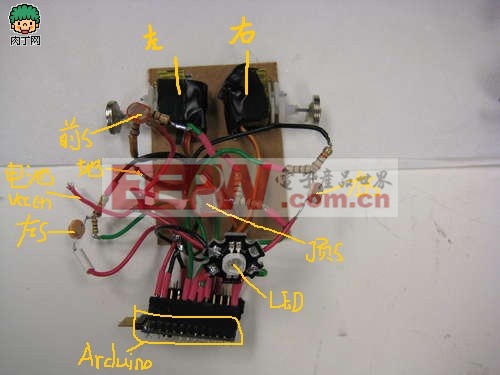
● 我程序里是这样设置的:Analog 0 > 顶部的传感器;Analog 1 > 左边的传感器;Analog 2 > 前面的传感器;Analog 3 > 右边的传感器。
9 加上RGB LED灯

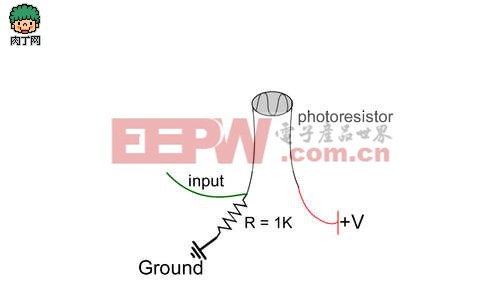
● 把每个光敏电阻(光传感器)都连到Arduino上,一共4个传感器,左、右、前、后。
● 你是不是想在每个端口和LED灯之间放个电阻(200 欧姆左右)?我没有酱紫,因为我的LED灯可以承受的电压比Arduino能提供的高得多,所以不会被烧。
10 安装电池
● 其实捏,能提供3—4V的电池都可以用,越轻越好。我使用了sparkfun锂电池。接地,然后高压直接接Arduino的VCC口。
11 上程序!!
● 这代码是关于2个伺服电机根据4个光传感器的输入值而进行驱动。根据模式,有几种运动方式。 点此获得代码
红色最快,趋向物体(当光传感器检测到光被挡住时);
蓝色是中速,背向物体(背向黑色区域);
黄色最慢,检测到物体就停止。
● 小W和它的兄弟姐妹们通过磁铁轮子在墙上运动,可以左转右转和前行;根据不同模式可进行调速。
● 当顶部的传感器被遮住超过3秒,所有传感器自动校准。
12 别让小W裸奔
● 给小W穿件衣裳。但之前必须确定程序能跑,然后你能分得清哪个伺服机是左,哪个是右。

● 因为小W要垂直运动,衣裳越轻越好啊!我用的硬纸壳,其实报纸或者轻塑料都能使。

● 我把伺服机用热胶黏在硬纸盒里,传感器分布在前后左右,然后用硬纸壳加固。为了让热传感器和齿轮舒舒服服在里面呆着,我量体裁衣剪了些洞。小W的顶部其实就是。。。就是一张纸!

DIY机械键盘相关社区:机械键盘DIY
伺服电机相关文章:伺服电机工作原理









评论