表情机器人设计与实现

摘要:表情机器人的研究在国内还处于初级阶段,为了推进这一新的科学热点的研究,本文从生物学的角度和和谐人机交互的角度出发,运用了机械设计、传感器技术、舵机控制、嵌入式系统、人工智能等技术设计了一个情感机器人头,它可以和人进行对话并产生表情,最终为人机交互的过程中人们能与计算机进行具有情感、自然、和谐的交互提供接口。
1 引言
十多年前“诡异谷”【1】的理论制约了类人机器人的发展,但随着科技的发展,人们再次把关注的眼光投向了“更像人类的机器人”身上,机器人博览会上的saya[2]已经到了以假乱真的地步,制作外形和行为方式更接近于人类的机器人已经成为了新的焦点和热点。在国外的一些科学家已经取得了一定的成绩,但在国内,对于表情机器人的研究还处于初级阶段,为了能在08年的奥运会上看到我们自己制作的机器人解说员,北京科技大学的王志良老师的课题组正致力于此项研究并取得了一定的成果。
2机器人头部的设计要求
本设计的目的是设计一个仿人的机器人头部,以实现各种表情,来表达机器人内在的情感状态,最终使机器人能通过丰富生动的表情与人进行自然流畅的情感交流。既然如此,所要设计的机器人头部,就必须满足下面的要求:
1 外观从相当程度上符合人类的审美观点,能给人以亲切感和可信任感;
2 其整体乃至局部的尺寸,以及每个器官所能运动的幅度都要与人类的头部相接近,也就是说,在接近人脑这个有限的空间内,要放置眼、耳、鼻、口、眉等器官以及相应的驱动部件和传动机构;
3 整体机构的动作要协调,要符合人类头、面部的运动规律,要求运动传递要准确,不能失真,这样才能准确的控制每一个运动单元达到要求的位置,实现总体的协调;
4 因为考虑实际制造时要为机器人加上摄像头、微型麦克甚至力觉等传感器,所以设计时必须留出必要的空间。整个设计具有空间狭窄,运动范围小,运动准确,负载小的特点,这也是整个设计所要着重解决的问题;
5 可以实现眼球转动,眼睑开合,头部转动。
从机器人整体结构出发,在考虑机构的运动学、动力学和控制系统、驱动系统要求的前提下进行机器人头部机构设计。
人头部运动包括颈部自由转动和摆动、以及面部眼球、眼睑、下颚的运动。
部位 | 运动机能 | 单元数 | 自由度数 |
眼球 | 上下转动、左右转动 | 2 | 4 |
眼睑 | 闭合 | 2 | 2 |
眉毛 | 上下移动 | 2 | 2 |
颈部 | 左右转动、上下摆动 | 1 | 2 |
下颚 | 闭合 | 1 | 1 |
3机器人头部结构设计
眼睛部分共有四个自由度,包括眼球的绕Z 轴和绕Y 轴旋转。对于人类的眼球,正常的情况下,任何表情时,两个眼球的绕Y 轴旋转运动都是完全同步的,因此,可以使这两个眼球的绕Y 轴旋转共用一个伺服电机驱动,既节省了空间,又简化了机构【3】。
眼睑有一个绕Y轴转动的自由度,两个眼睑的两个自由度是分开的,所以共有两个自由度 ,因为在装完眼球后剩下的空间比较小,还不能和眼球发生干涉,所以要在有限的空间内加入眼睑的结构,不能太过于复杂,选择了一级传动。
每条眉毛应该具有五个自由度,分别是左端两个,右端两个和中间一个。但是,左右两端在Y轴方向的自由度,运动范围很小,几乎对表情起不到明显可见的作用。而且,对于一条眉毛来说,五个自由度的机构过于复杂。因此,本设计中将其简化成一个自由度,即眉毛左、中、右三点的Z 方向自由度。
嘴这个部分总共有六个自由度的运动,包括左右嘴角各有一个X向和Y 向的直线运动,上、下唇各有一个Z 向直线运动。这部分的机构部分基本都安置在嘴与眼之间的空间里。另外,两个嘴角处的Y 向运动轨迹并不是在Y 一Z平面上,而是与该平面成大约150 度角。同是直线运动,这里采用了与眉毛相类似的机构。
下颚部分只有一个绕Y 轴旋转的自由度,从结构上看比较简单,由伺服电机直接驱动,但是因为整个下颚组件质量以及相对转轴的力臂较大,造成该机构所需驱动力矩较大。另外,该机构还需要能够自锁,即在停止工作和任何时候电机停转时,下颚必须保持在原位不动,所以下颚机构在面部来说是负载最大的一部分。
机构分析为了使机器人的表情更加灵活生动,增加了颈部的运动。机器人颈部共有两个自由度,分别是绕Y , Z 轴旋转。本设计采用,在颈部接近头部的位置安装伺服电机,分别驱动绕 Y 轴的旋转,在最下部的位置,即基座内安装颈部第二个伺服电机,驱动整个机器人头、颈部绕Z 轴旋转的运动。
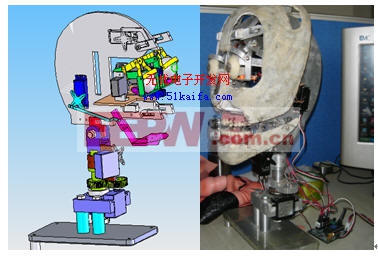
图1 情感机器人头
4系统概述
类人机器人需要具备的特点有:与人类似的传感系统、语音接收、图像接收、感觉系统等等。有类似人的外形,有类似人的思维和行为。
于是我们设计了一个系统,系统中的东西很多,如图2所示是一个硬件的结构图。整个系统分为三大部分:
1、摄像头和无线话筒,属于媒体设备。视觉和听觉,是人和人之间交流的非常重要的部分。因此仿人机器人也应该具有该项功能,于是我们就要用摄像头和话筒来接收这些信息。而图像处理和语音识别是一个非常复杂而又繁重的工作,嵌入式系统完成该项工作就比较困难,我们计划将摄像头采集来的图像和声音通过无线视频设备和无线话筒传送给PC机,用PC做图像处理和语音识别。用PC机对图像和语音进行处理之后,根据我们事先定义好的控制协议来控制机器人。
2、PC机。接收图像和语音信息,并进行图像处理和语音识别,根据协议转换成控制指令。对于处理好的控制指令和数据,我们通过无线和有线两种方式传给嵌入式系统,嵌入式系统根据定义好的控制指令和数据来执行操作。同时PC机也可以接收嵌入式系统发送过来的数据,并对数据进行分析和处理。
3、嵌入式系统部分。嵌入式系统有两个功能:首先是对机器人的实时控制和接收来自PC机的数据和控制指令,其次采集机器人目前的状态,主要的传感器有摄像头、麦克和语音输出。考虑到机器人的体积和处理能力的要求,我们采用了性能稳定可靠,同时运算能力较强的PIC系列单片机。
根据舵机控制的需求,我们要对控制器进行选择,还要考虑控制对象精度,力矩要求,控制器重量等。根据上面的要求,选用PIC16F877作为主要的控制芯片【4】。
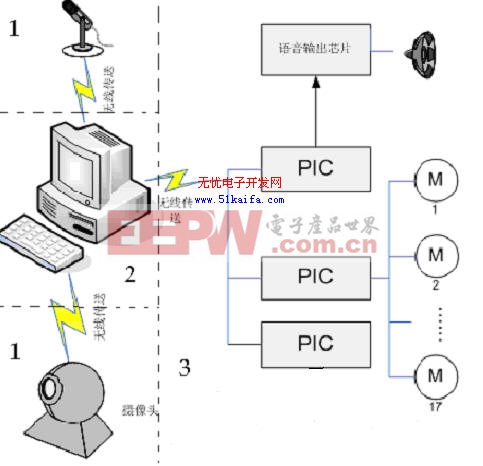
图 2 系统硬件结构
下位机PIC控制多舵机运动。PIC控制程序流程图如图3。

图3 程序流程图

图4 样机
表情机器人样机如图4。
5结论
本文以生物学为基础,以多种学科技术相融合的方法提出了研究情感机器人的一种新方法,虽然受到现实环境的制约,机器人的表情还比较粗陋,不够细腻,但完全按照真实人的外貌来制作机器人在国内还是首次。在这个机器人的基础上,我们要进一步细化机器人的表情,最终达到服务型机器人的标准。
参考文献
[1] Mori, Masahiro (1970). Bukimi no tani the uncanny valley. Energy, 7(4), 33C35. (In Japanese)
[2] http://www.androidworld.com
[3] 加藤介阳,原文雄.Face Robot Mark Ⅲ Platform for Experiments of Communicative Interaction with Humans.2002
[4] 刘涛.基于遗传算法的双足步行机器人步行姿态控制策略.微计算机信息,2006,7-2, 252-254.

伺服电机相关文章:伺服电机工作原理








评论