永磁同步电动机矢量控制
3 系统仿真
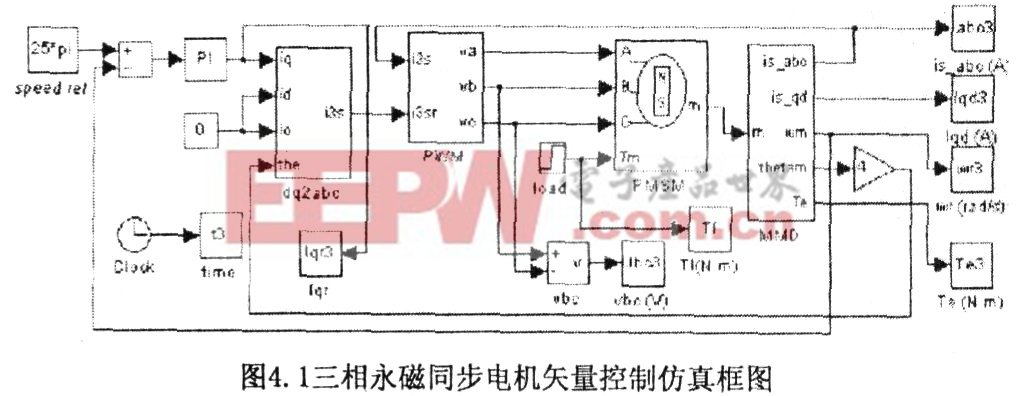
图4.1三相永磁同步电机矢量控制仿真框图基于转子磁场定向的三相PMSM矢量控制系统仿真框图如图4.1所示。图中PI模块为速度环PI控制器,根据电机实际速度及给定速度来确定电流转矩分量;PWM模块采用电流滞环控制(如图4.2),使电机实际电流跟随给定电流变化,具体实现如图4.3;模块dq2abc实现2r/3s变换,具体实现如图4.4,其中函数模块Fcn、Fcnl和Fcn2一起实现2r/3s变换;MMD模块为电机测量模块,它实时测量电机的速度、电流、转子位置等信号:PMSM模块为MATLAB提供了永磁同步电机模型,它的具体实现如图2.1。
4 仿真图形及结果分析
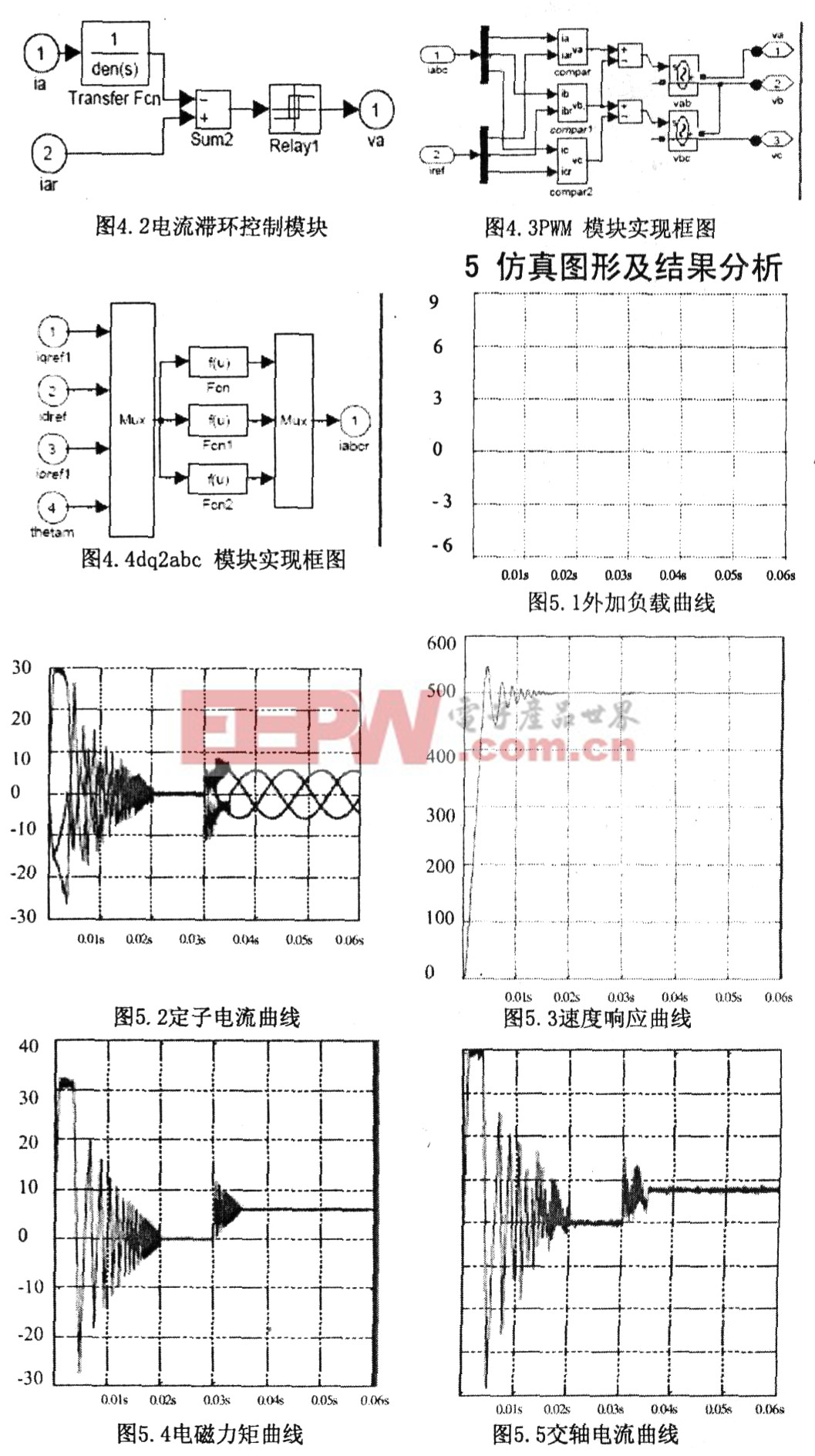
仿真中用到的电机参数如下:定子电阻为2.875Ω,定子直轴电感和交轴电感都为8.5e一3H,永磁磁极与定子绕组交链的磁链为0.175Wb,转动惯量0.8e一3kgm2,极对数6,给定转速为ωr=500rpm,在t=0.03s时,负载转矩由ON・m突变为6N・m,见图(5.1)。
由上述仿真结果可知,普通三相永磁同步电机采用基于转子磁场定向的矢量控制方案,且速度外环采用PI控制时,速度响应过程中有一定超调见图(5.2)。当突加负载时,速度立即下降,然后逐渐恢复稳定见图(5.3):若在速度外环采用PID控制,即在速度外环加一个小的微分环节D并适当降低比例放大系数P,可有效降低超调量,并且缩短电机启动和突加负载时电机到达稳态的时间。交轴实际电流始终跟踪交轴给定电流见图(5.5),且启动过程中和突加负载时,两者变化幅度较大,而稳定时两者都基本恒定,稳态时电磁力矩恒定见图(5.4),以便平衡外加负载;速度稳定时三相定子电流为规整的正弦电流,且相位依次相差约120°。

电动机相关文章:电动机工作原理设计















评论