基于PLC的三自由度机械手控制系统设计与实现

摘要:为了提高机械手在工业生产中定位的精度,介绍一种基于PLC的三自由度机械手控制系统设计方案。方案中提出了步进电机在机械手定位应用中的一种新思路,详细论述三自由度机械手控制系统的硬件结构及软件实现方法,并建立M(GS组态环境界面对系统的运行进行监控。测试结果表明,该系统运行稳定,定位精确,具有较高的应用价值。
关键词:PLC;三自由度;机械手;步进电机;MCGS组态环境
0 引 言
机械手是一种能模拟人的手臂动作,按照设定程序、轨迹和要求,代替人手进行抓取、搬运工件或操持工具的机电一体化自动装置。三自由度机械手又称3D机械人,能够实现三个自由度方向(水平、垂直和旋转)的抓取或放置物品,具有操作范围大,灵活性好,应用广泛的特点。
可编程控制器(PLC)是一种专门为工业应用而设计的进行数字运算操作的电子控制装置。由于其具有可靠性高,功能强,编程简单,人机交互界面友好等特性而广泛用于工业控制系统。
步进电机是将电脉冲信号转变为角位移或线位移的开环执行元件。在非超载情况下,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数目。这一线性关系的存在,加上步进电机只有周期性误差而无累计误差的特点,使其在速度、定位等控制领域应用得非常广泛。
机械手按驱动方式可分为液压式、气动式、电动式和机械式机械手。本文设计的三自由度机械手属于混合式机械手,它综合了电动式和气动式机械手的优点,既节省了行程开关和PLC的I/O端口,又达到了简便操作和精确定位的目的。
1 三自由度机械手的系统结构与运动方式
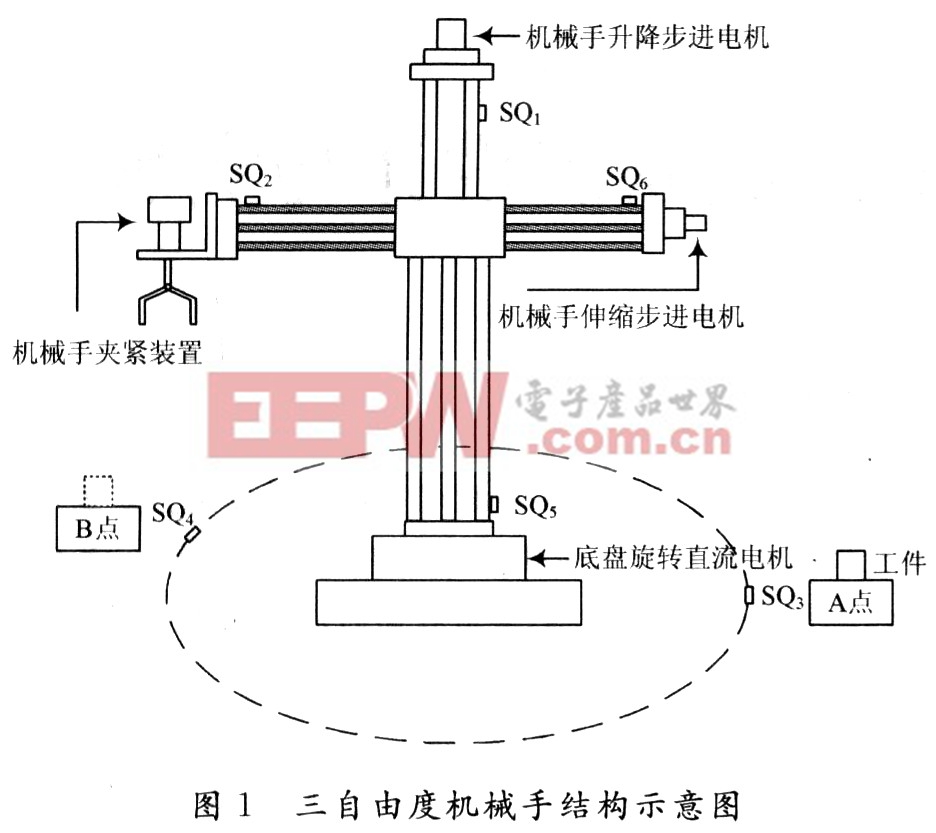
三自由度机械手为圆柱坐标型。图1为机械手结构示意图,机械手手臂的左右运动(水平方向)由伸缩步进电机控制,上下运动(垂直方向)由升降步进电机控制,逆时针和顺时针旋转运动则由底盘直流电机的正反转控制。机械手的夹紧装置采用关节结构,其夹紧与松开用气压驱动,并由电磁阀控制。
机械手可以根据设定程序的动作将工件从A处搬运到B处。SQ1,SQ2,SQ5,SQ6为水平和垂直方向上的限位开关,SQ3,SQ4为原点位置和终点位置的光接近开关。
2 三自由度机械手控制系统设计
三自由度机械手系统设置了手动工作方式和自动工作方式。自动方式又分为自动回原点、单步、单周期、连续四种工作方式。
2.1 硬件设计
主控制系统选用三菱FX2N系列晶体管输出型PLC,步进电机驱动器选用SH-20403型模块。机械手的外部接线图如图2所示。


pid控制器相关文章:pid控制器原理
电容式接近开关相关文章:电容式接近开关原理








评论