复杂路线下机器人的三点三轮寻迹系统

引 言
智能寻迹机器人是一种被广泛研究的机器人,而且国内外都有许多重要的比赛都以寻迹机器人为核心展开,如我国的“飞思卡尔”杯全国大学生智能车大赛,以及吸引亚太地区众多国家参赛的亚广联(ABU)机器人大赛等。
所谓的复杂路线,即由小半径弯道、各种角度折道、直道等组成的不规则导引线,它是相对由大半径弯道组成、过渡平滑的简单路线而言的。笔者所设计的寻迹机器人小车,以AT89C52单片机为控制芯片,采用自制的3个红外光电传感器,以简单的设计、较低的成本实现了复杂路线下机器人的自主寻迹。
1 硬件及电路
1.1 控制芯片
考虑到实用性和性价比,采用AT89C52单片机作为机器人的控制芯片。AT89C52是美国Atmel公司生产的低电压、高性能CMOS 8位单片机,片内含8 KB的可反复擦写的只读存储器(PEROM)和256B的随机存取数据存储器(RAM),32个I/O口线,3个16位定时/计数器,1个全双工串行通行口。器件采用Atmel公司的高密度、非易失性存储技术生产,与标准MCS-51指令系统及8052产品引脚兼容。
1.2 传感器模块
作为寻迹机器人的“眼睛”,选择合适的传感器是关键。目前市面上可选用的传感器主要有CCD传感器和红外光电传感器两种。近年来CCD传感器技术已趋成熟,在近几届“飞思卡尔”杯智能车大赛上,采用CCD传感器的智能车越来越多,并取得了不错的成绩。不过,CCD传感器价格较高,体积较大,数据处理相当复杂,因此在按既定路线行走的寻迹机器人设计中,红外光电传感器以其体积小、价格低、数据处理简单而显得更有优势。
红外光电传感器由1个红外发射管和1个光敏二极管组成。工作时,红外发射管发射的红外光被被测表面反射回来,光敏二极管接收被反射光。由于被测表面的材质不同,反射率也不一样。当被测表面为白色时,反射光较强,光敏二极管将导通;反之,被测表面为黑色时,光敏二极管将截止。考虑到外界环境光照等干扰因素,输出的电压值有一定的波动范围,若直接输给单片机,可能导致检测判断错误。因此,需要将输出电压通过比较器(LM324)与预置的阈值电压比较,然后得出一个高低电平输给单片机。阈值电压通过试验测量得出,其电路如图1所示。其中LED为传感器工作指示灯,R1为阈值电压调节电阻。
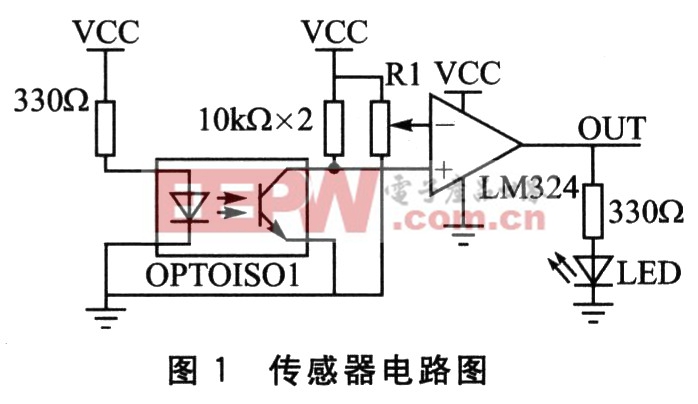
根据上述电路,自制了3个简易的红外光电传感器。经测试表明,性能良好,有效检测距离为1~4 cm,满足机器人寻迹的要求。









评论