一种新型改进仿人智能控制在时滞系统中的研究

0 引言
积分作用从某种意义上来说是人的记忆功能的模拟。对人而言,记忆功能具有某种选择性;在控制中,人总是有选择地记忆有用的信息而不记忆无用的信息。根据这一发现,周其鉴于1983年提出了著名的仿人智能积分控制算法:
其中:u-控制输出;Kp-比例系数;k-抑制系数;e-误差;e-误差变化率;em,i-误差第i次峰值。
但是,信息的有用性是相对的,当时过境迁时,原来一些有用的信息会变成无用。这时除了不记忆当前无用的信息外还会遗忘那些原来有用而当前变得无用的信息。因此,仿人智能积分控制中的积分作用除表现人的记忆与不记忆两种行为外,还应该加上遗忘行为。
1 仿人智能积分控制
常规PID控制中的积分作用,不加选择地“记忆”了误差及误差变化的所有信息,其中也包含了对控制不利的信息。因此,这种积分作用缺乏智能性,其对误差的积分过程如图1所示,且这种积分作用的针对性不强,甚至有时不符合控制系统的客观需要,只要误差存在就一直进行积分,造成“积分饱和”。
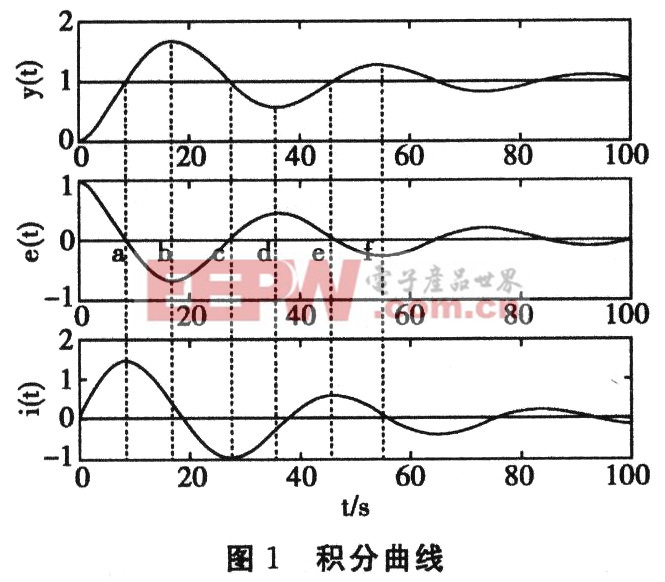
在积分曲线的(c,d)段,积分作用增加一个正量的控制有利减小回调,但在(d,e)区间积分作用继续增强,其结果势必造成系统再次出现超调,这时的I控制作用对系统有害无利。为了克服这种积分控制作用的缺点,满足ee>0,加上积分作用。这样,积分控制作用及时给出合适的附加控制量,能有效地抑制系统误差的增加,而在ee>0时,取消积分作用,使系统借助惯性向稳态过渡。






评论