基于机器视觉的智能导览机器人控制系统设计

1 引言
移动机器人是机器人学一个重要分支,且随着相关技术的迅速发展,它正向着智能化和多样化方向发展,应用广泛,几乎渗透所有领域。于春和采用激光雷达的方式检测道路边界,效果较好,但干扰信号很强时,就会影响检测效果。付梦印等提出以踢脚线为参考目标的导航方法,可提高视觉导航的实时性。
这里采用视觉导航方式,机器人在基于结构化道路的环境下实现道路跟踪,目标点的停靠,以及导游解说,并取得较好的效果。
2 导览机器人简介
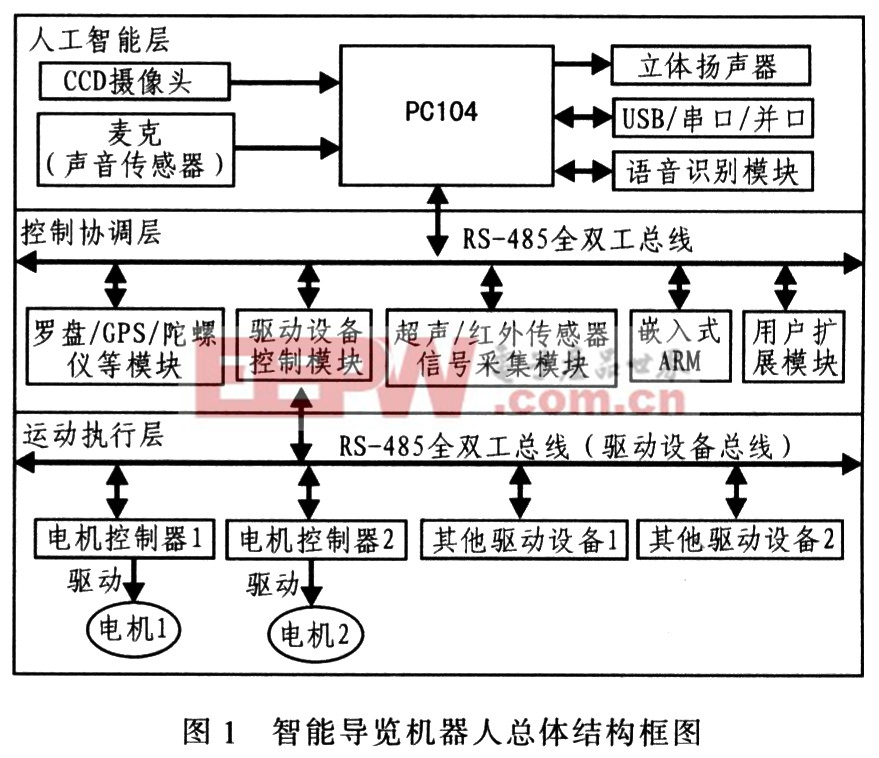
导览机器人用在大型展览馆、博物馆或其他会展中心,引导参访者沿着固定路线参访,向参访者解说以及进行简单对话。因此导览机器人必须具有自主导航、路径规划、智能避障、目标点的停靠与定位、语音解说以及能与参访者进行简单对话等功能,并具有对外界环境快速反应和自适应能力。基于层次结构,导览机器人可分为:人工智能层、控制协调层和运动执行层。其中人工智能层主要利用CCD摄像头规划和自主导航机器人的路径,控制层协调完成多传感信息的融合,而运动执行层完成机器人行走。图1为智能导览机器人的总体结构框图。
3 导览机器人硬件设计
3.1 人工智能层硬件实现
考虑到移动机器人控制系统要求处理速度快、方便外围设备扩展、体积和质量小等要求,因此上位机选用PC104系统,其软件用C语言编程。采用USB摄像头,采集机器人前方的视觉信息,为机器人视觉导航,路径规划提供依据。外设麦克和扬声器,当机器人到达目标点后,进行导览解说。
3.1.1 控制协调层的硬件实现
机器人传感器的选取应取决于机器人的工作需要和应用特点。这里选用超声波传感器、红外传感器、电子罗盘及陀螺仪,采集机器人周围环境信息,为机器人避障、路径规划提供帮助。利用ARM处理平台,通过RS-485总线驱动电机,驱动机器人行走。











评论