模糊控制在基于CAN总线的数据采集与控制系统中的应用

(1) 多主方式工作,非破坏性的基于优先权的总线仲裁技术;
(2) 采用短帧结构,受干扰概率低,每帧信息都有CRC校验及其它检错措施;
(3) 对严重错误具有自动关闭总线功能,使总线其它操作不受影响;
(4) 灵活的传输介质,多样、快速和远距离的信息传送方式。
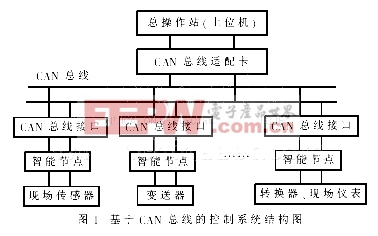
基于CAN总线的以上特点,我们设计了一种采用CAN总线技术和模糊控制技术的控制系统,其结构框图如图1所示。
2 模糊控制器的设计
模糊控制器的设计主要是设定各输入与输出变量模糊子集的隶属函数?模糊变量的量化论域、模糊控制规则、输入输出变量的比例变换因子等参数。常规模糊控制器的输入是将连续信息经量化因子量化成几个等级后的数据,但因不能把输入论域无限细分,只能划分为有限的几个等级,且由于系统没有积分环节,所以在系统的平衡点附近容易产生振荡或出现极限环。针对常规模糊控制器不能消除稳态误差的情况,我们设计了一种智能型模糊控制器,其结构图如图2所示。
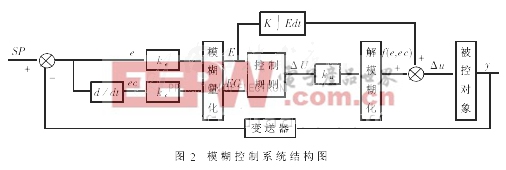
该模糊控制器与常规模糊控制器的不同之处就是在控制规则库上并联了一积分环节以减少或消除系统的稳态误差。其控制规则可根据系统的控制响应曲线来获得,为了使系统输出尽快跟踪输入且使系统误差在允许的精度范围内,采用了分段引入积分环节。在系统响应曲线偏离平衡点即系统误差趋势增大时,引入积分作用;而在系统响应曲线从偏离点趋向平衡点即系统误差趋势变小时,取消积分作用。并且K值的大小要适中,过大会使系统振荡,过小体现不了积分作用。此设计思想可写成如下表达式形式:

其中,f(e,ec)为模糊控制规则部分的输出,K∫Edt为积分环节的输出。
由图2可知,该模糊控制器的输入为系统的偏差e和偏差变化率ec,输出为控制量的增量Δu;ke、kc为量化因子,ku为比例因子;E、EC、ΔU分别为e、ec和Δu的模糊语言变量。输入、输出变量被划分为正大(PL)、正中(PM)、正小(PS)、零(ZO)、负小(NS)、负中(NM)、负大(NL)7个模糊状态,其相应论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}13个等级。在充分考虑到控制系统的非线性?大时滞等情况下,根据专家先验知识和现场熟练操作者总结出来的操作经验,我们得出如下的控制规则,如表1所示。












评论