基于DSP和CAN的电机同步控制系统与通信

0 引言
传统的多电机控制系统适用于要求不高、相对简单、电机分布比较集中的场合。而对于运动控制中实时性、可靠性、可扩展性、传输距离、传输速度等要求较高的场合,需要采用高传输速度、远传输距离、可靠性较高的通信方式和处理速度快、功能强大、能够实现复杂控制策略的处理器。
控制器局域网CAN(Controller Area Network)是一种有效支持分布式控制和实时控制的串行通信网络。它属于现场总线范畴,与现有的其它总线相比,它是一种分散式、数字化、双向、多站点的通信系统,具有速率高、可靠性好、智能化高、连接方便等诸多优点,在分布式测试和工业控制等相关领域的应用越来越广泛[1]。
数字信号处理器(Digital Signal Processor,DSP)是一种高速专用微处理器,TMS320F2407A运算功能强大,能实现高速输入和高速率传输数据,且带CAN总线接口。它专门处理以运算为主且不允许延迟的实时信号,可高效进行快速傅里叶变换运算。数字信号处理器的精度高,可靠性好,其先进的品质与性能可为电机控制提供高效可靠的平台[2]。
鉴于CAN总线的通信优势和DSP的强大处理能力,利用二者完全可以设计完成要求较高的多电机控制网络系统。这种功能强大、智能化和网络化程度较高的网络系统满足了工艺复杂、要求较高的多电机控制,它正在兴起并成为多电机控制网络系统的发展趋势[3]。
1 系统结构及其实现
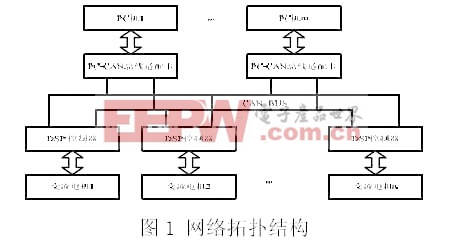
基于CAN总线网络的新型多电机同步控制系统,采用总线式多主多从网络拓扑结构。当系统中不仅有工程师层还包括管理层即多个主节点时,主主通信将实现不同功能主节点的交流(如图1)。整个控制系统由三部分组成:CAN总线、上级PC机、DSP控制系统。系统采用PC 机作为监控主机,实现对各节点的监控和管理;CAN 总线接口卡完成CAN协议的物理层和数据链路层功能,实现PC 机与CAN 总线之间的通信;各从节点通过DSP完成数据的收发和对交流电机的控制[4]。
主节点采用PC微机(或其他兼容机),通过PCI总线双路智能CAN网卡(通信适配器)与CAN总线相连,进行信息交换。CAN网卡电路共分为三大部分:由DS89C420微处理机、74LS373锁存器、32KB的RAM 62256、32KB的EPROM 27256组成的主机部分;双口RAMIDT7005S35PF及其控制电路;由SJA1000、光电隔离电路、82C250组成的CAN控制器和CAN总线接口电路。
从节点由两部分构成:电机控制板和功率驱动板。从节点的基本框图如图2所示。电机控制板以TMS320LF2407A为核心,外围采用各功能模块。其中,PWM模块用于驱动功率器件,A/D模块用来把系统所需要的电流模拟量变换成数字量,实现电流环反馈控制。磁场平衡式霍尔电流传感器(LEM模块)把互感器、磁放大器、霍尔元件和电子线路集成在一起,具有测量、反馈、保护三种功能,LEM模块的输出输入到DSP的三路A/D转换口,转换成数字信号后,再进行相应的处理。光电码盘把检测信息反馈到DSP的正交编码脉冲电路(QEP),实现速度环反馈控制。当LF2407A的QEP被使能(禁止捕获功能),定时器2对引脚CAP1/QEP1和CAP2/QEP2、定时器4对引脚CAP4/QEP3和CAP5/QEP4上的脉冲数目和频率分别计数,可得到电机的角位移和转速。功率驱动板由整流滤波、IGBT驱动、以及IGBT桥和反馈电路组成[5]。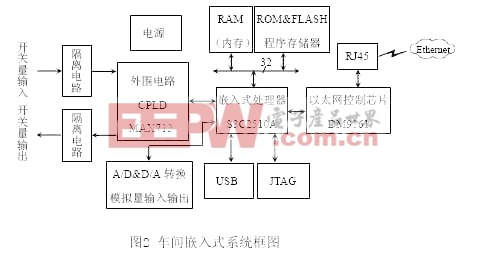
2 软件设计
2.1 CAN 总线网络通信协议设计
CAN 总线采用一种串行数据通信协议,它能有效地支持具有较高安全等级的分布实时控制。根据CAN总线技术规范CAN2.0A、CAN2.0B,本文设计了用户通信协议,各个节点都按此协议传送信息。用户通信协议的帧结构共10个字节(2个字节标识符、8个字节数据和变量),其定义如图3所示。
PRI:1为低优先级,0为高优先级,而剩余的优先级由源地址决定,低地址优先级高。
帧类型:100为单帧广播;000为单帧点对点。
命令或物理变量名:cmd0、cmd1的功能定义有很多,表1仅给出了几种典型的定义。节点根据接收到的数据中两个字节的内容来确定被传送的内容。
物理变量序号:0~255。
Data3~Data0:定义为一个物理变量数据,4字节长整数,原码表示。数据类型为整型、布尔型或浮点型。











评论