基于S3C44B0X的移动机器人的应用研究

移动机器人利用导航技术,获得机器人的目前所处的位置,结合传感器技术对周围外界环境(障碍物等)作实时探测,并根据环境提供的信息规划一条可行路径完成达到目标点的任务。移动机器人技术涉及到传感器技术,导航技术,计算机技术,人工智能等多个领域,因而对移动机器人的控制部分提出很高的要求,特别是视觉传感器的出现,要求控制系统不仅存储量大,而且处理速度快等。以往基于PLC和单片机控制的移动机器人就不能很好的满足实时性快速性的特点。
本文引用地址:https://www.eepw.com.cn/article/163449.htm随着ARM处理器的出现和发展以及嵌入式系统的发展,移动机器人的实时性快速性要求便能得到很好满足,现在该技术已经在多种领域得到有效的应用。本文是以SAMSUNG公司一款基于ARM7TDMI核的低功耗高性能的32位处理器芯片S3C44B0X为控制核心,以凌阳16位单片机SPCE061A为辅助处理器来处理传感器探测的障碍物信息,并运用嵌入式实时多任务操作系统µC/OS-II管理移动机器人的导航算法的实现和多任务的执行。实验结果表明:该系统能够实现避障和导航功能并能顺利达到目的地。
2 控制系统的硬件设计
移动机器人的控制系统主要完成对外界障碍物的探测与信息的传输,机器人当前位置的获取,路径规划,和运行控制等功能。对系统进行功能模块化划分,本系统可划分以下五大模块:环境探测模块;全局定位模块;程序下载模块,电机驱动模块和电源管理模块。各个模块之间的关系如图1所示。
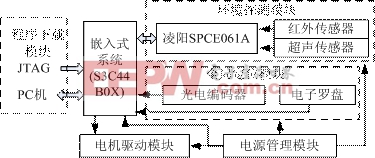
图1 控制系统硬件系统图
2.1 环境探测模块
移动机器人在避障和路径规划过程中,机器人必须实时探测周围的障碍物的信息,测量障碍物的距离。目前有红外,超声波,激光和视觉(CDD)传感器,激光传感器受环境影响大,价格比较昂贵,视觉传感器(CCD)要求芯片的存储容量大且要求处理速度快等特点,不易采用。基于这一点本文在移动机器人的前方,左方,右方各安装一套红外传感器和超声波传感器以测量3个方向的障碍物的距离,多传感器的使用可以避免了单一传感器的测量存在的盲区。
红外传感器有发射器和接受器构成,此传感器的3路发射端口接凌阳单片机SPCE061A的3路I/O口,3路接受器的端口接单片机的另外3路。当单片机I/O输出为高电平时,发射器端口发射红外光,光波遇到障碍物反射被接受器,产生光强相对的电流经过A/D转换输入单片机,根据电压大小计算障碍物的距离。超声波传感器的工作原理与红外传感器基本相同,声波遇到障碍物返回被接受器接受,根据时间差计算障碍物的距离。
该探测模块可以测量0~2m距离内的障碍物,测量误差小,采用16位凌阳单片机SPCE061A对障碍信息进行快速处理,一旦探测到障碍物便通过总线接口与S3C44B0X通讯并作数据传输。










评论